WARNING: This documentation is not maintained anymore. Some part might be obsolete or wrong, some part might be missing but still some valuable information can be found there. Instead please refer to the ROOT Reference Guide and the ROOT Manual. If you think some information should be imported in the ROOT Reference Guide or in the ROOT Manual, please post your request to the ROOT Forum or via a Github Issue.
% Chapter: Introduction ________________________________________________________________________________________ WARNING: This documentation is not maintained anymore. Some part might be obsolete or wrong, some part might be missing but still some valuable information can be found there. Instead please refer to the ROOT Reference Guide and the ROOT Manual. If you think some information should be imported in the ROOT Reference Guide or in the ROOT Manual, please post your request to the ROOT Forum or via a Github Issue.
% Chapter: Introduction ________________________________________________________________________________________ WARNING: This documentation is not maintained anymore. Some part might be obsolete or wrong, some part might be missing but still some valuable information can be found there. Instead please refer to the ROOT Reference Guide and the ROOT Manual. If you think some information should be imported in the ROOT Reference Guide or in the ROOT Manual, please post your request to the ROOT Forum or via a Github Issue.
In the mid 1990’s, René Brun and Fons Rademakers had many years of experience developing interactive tools and simulation packages. They had lead successful projects such as PAW, PIAF, and GEANT, and they knew PAW the twenty-year-old FORTRAN libraries had reached their limits. Although still very popular, these tools could not scale up to the challenges offered by the Large Hadron Collider, where the data is a few orders of magnitude larger than anything seen before.
At the same time, computer science had made leaps of progress especially in the area of Object Oriented Design, and René and Fons were ready to take advantage of it.
ROOT was developed in the context of the NA49 experiment at CERN. NA49 has generated an impressive amount of data, around 10 Terabytes per run. This rate provided the ideal environment to develop and test the next generation data analysis.
ROOT was, and still is, developed in the “Bazaar style”, a term from the book “The Cathedral and the Bazaar” by Eric S. Raymond. It means a liberal, informal development style that heavily relies on the diverse and deep talent of the user community. The result is that physicists developed ROOT for themselves; this made it specific, appropriate, useful, and over time refined and very powerful. The development of ROOT is a continuous conversation between users and developers with the line between the two blurring at times and the users becoming co-developers.
When it comes to storing and mining large amount of data, physics plows the way with its Terabytes, but other fields and industry follow close behind as they acquiring more and more data over time. They are ready to use the true and tested technologies physics has invented. In this way, other fields and industries have found ROOT useful and they have started to use it also.
In the bazaar view, software is released early and frequently to expose it to thousands of eager co-developers to pound on, report bugs, and contribute possible fixes. More users find more bugs, because they stress the program in different ways. By now, after ten years, the age of ROOT is quite mature. Most likely, you will find the features you are looking for, and if you have found a hole, you are encouraged to participate in the dialog and post your suggestion or even implementation on the ROOT forum.
If you have a question, it is likely that it has been asked, answered, and stored in the ROOT Forum. Please use the search engine to see if your question has already been answered before posting a topic in the Forum.
You can access the ROOT forum at: https://root-forum.cern.ch.
Several authors wrote this book and you may see a “change of voice” from one chapter to the next. We felt we could accept this in order to have the expert explain what they know best. If you would like to contribute a chapter or add to a section, please contact rootdoc@cern.ch. We count on you to send us suggestions on additional topics or on the topics that need more documentation. Please send your comments, corrections, questions, and suggestions to the rootdoc list: rootdoc@cern.ch
We attempt to give the user insight into the many capabilities of ROOT. The book begins with the elementary functionality and progresses in complexity reaching the specialized topics at the end. The experienced user looking for special topics may find these chapters useful: see “Networking”, “Writing a Graphical User Interface”, “Threads”, and “PROOF: Parallel Processing”.
We tried to follow a style convention for the sake of clarity. The styles in used are described below.
To show source code in scripts or source files:
{
cout << " Hello" << endl;
float x = 3.;
float y = 5.;
int i = 101;
cout <<" x = "<<x<<" y = "<<y<<" i = "<<i<< endl;
}To show the ROOT command line, we show the ROOT prompt without numbers. In the interactive system, the ROOT prompt has a line number (root[12]); for the sake of simplicity, the line numbers are left off.
Italic bold monotype font indicates a global variable, for example gDirectory.
When a variable term is used, it is shown between angled brackets. In the example below the variable term <library> can be replaced with any library in the $ROOTSYS directory: $ROOTSYS/<library>/inc.
ROOT is an object-oriented framework aimed at solving the data analysis challenges of high-energy physics. There are two key words in this definition, object oriented and framework. First, we explain what we mean by a framework and then why it is an object-oriented framework.
Programming inside a framework is a little like living in a city. Plumbing, electricity, telephone, and transportation are services provided by the city. In your house, you have interfaces to the services such as light switches, electrical outlets, and telephones. The details, for example, the routing algorithm of the phone switching system, are transparent to you as the user. You do not care; you are only interested in using the phone to communicate with your collaborators to solve your domain specific problems.
Programming outside of a framework may be compared to living in the country. In order to have transportation and water, you will have to build a road and dig a well. To have services like telephone and electricity you will need to route the wires to your home. In addition, you cannot build some things yourself. For example, you cannot build a commercial airport on your patch of land. From a global perspective, it would make no sense for everyone to build their own airport. You see you will be very busy building the infrastructure (or framework) before you can use the phone to communicate with your collaborators and have a drink of water at the same time. In software engineering, it is much the same way. In a framework, the basic utilities and services, such as I/O and graphics, are provided. In addition, ROOT being a HEP analysis framework, it provides a large selection of HEP specific utilities such as histograms and fitting. The drawback of a framework is that you are constrained to it, as you are constraint to use the routing algorithm provided by your telephone service. You also have to learn the framework interfaces, which in this analogy is the same as learning how to use a telephone.
If you are interested in doing physics, a good HEP framework will save you much work. Next is a list of the more commonly used components of ROOT: Command Line Interpreter, Histograms and Fitting, Writing a Graphical User Interface, 2D Graphics, Input/Output , Collection Classes, Script Processor.
There are also less commonly used components, as: 3D Graphics, Parallel Processing (PROOF), Run Time Type Identification (RTTI), Socket and Network Communication, Threads.
The benefits of frameworks can be summarized as follows:
Less code to write - the programmer should be able to use and reuse the majority of the existing code. Basic functionality, such as fitting and histogramming are implemented and ready to use and customize.
More reliable and robust code - the code inherited from a framework has already been tested and integrated with the rest of the framework.
More consistent and modular code - the code reuse provides consistency and common capabilities between programs, no matter who writes them. Frameworks make it easier to break programs into smaller pieces.
More focus on areas of expertise - users can concentrate on their particular problem domain. They do not have to be experts at writing user interfaces, graphics, or networking to use the frameworks that provide those services.
Object-Oriented Programming offers considerable benefits compared to Procedure-Oriented Programming:
Encapsulation enforces data abstraction and increases opportunity for reuse.
Sub classing and inheritance make it possible to extend and modify objects.
Class hierarchies and containment containment hierarchies provide a flexible mechanism for modeling real-world objects and the relationships among them.
Complexity is reduced because there is little growth of the global state, the state is contained within each object, rather than scattered through the program in the form of global variables.
Objects may come and go, but the basic structure of the program remains relatively static, increases opportunity for reuse of design.
To install ROOT you have the choice to download the binaries or the source. The source is quicker to transfer since it is only ~22 MB, but you will need to compile and link it. The binaries compiled with no debug information range from ~35 MB to ~45 MB depending on the target platform.
The installation and building of ROOT is described in Appendix A: Install and Build ROOT. You can download the binaries, or the source. The GNU g++ compiler on most UNIX platforms can compile ROOT.
Before downloading a binary version make sure your machine contains the right run-time environment. In most cases it is not possible to run a version compiled with, e.g., gcc4.0 on a platform where only gcc 3.2 is installed. In such cases you’ll have to install ROOT from source.
ROOT is currently running on the following platforms: supported platforms
GNU/Linux x86-32 (IA32) and x86-64 (AMD64)(GCC,Intel/icc, Portland/PGCC,KAI/KCC)
Intel Itanium (IA64) GNU/Linux (GCC, Intel/ecc, SGI/CC)
FreeBSD and OpenBSD (GCC)
GNU/Hurd (GCC)
HP HP-UX 10.x (IA32) and 11 (IA64) (HP CC, aCC, GCC)
IBM AIX 4.1 (xlC compiler, GCC)
Sun Solaris for SPARC (SUN C++ compiler, GCC)
Sun Solaris for x86 (SUN C++ compiler, KAI/KCC)
Compaq Alpha (GCC, KAI/KCC, DEC/CXX)
SGI Irix 32 and 64 bits (GCC, KAI/KCC, SGI C++ compiler)
Windows >= 95 (Microsoft Visual C++ compiler, Cygwin/GCC)
MacOS X PPC, x86-32, x86-64 (GCC, Intel/ICC, IBM/xl)
PowerPC with GNU/Linux and GCC, Debian v2
PowerPC64 with GNU/Linux and GCC
ARM with GNU/Linux and GCC
LynxOS
Now after we know in abstract terms what the ROOT framework is, let us look at the physical directories and files that come with the ROOT installation. You may work on a platform where your system administrator has already installed ROOT. You will need to follow the specific development environment for your setup and you may not have write access to the directories. In any case, you will need an environment variable called ROOTSYS, which holds the path of the top ROOT directory.
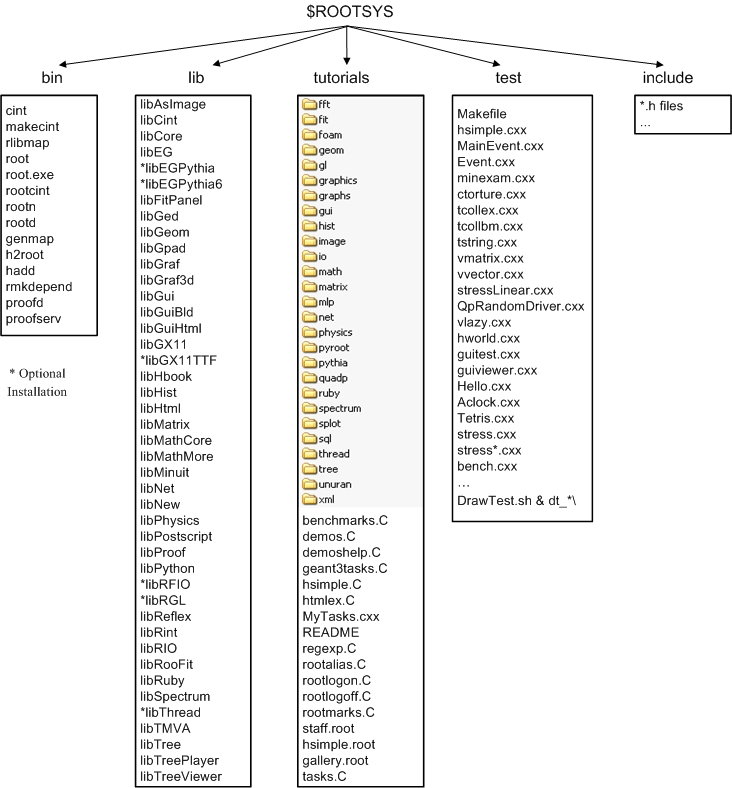
In the ROOTSYS directory are examples, executables, tutorials, header tutorials files, and, if you opted to download it, the source is here. The directories of special interest to us are bin, tutorials, lib, test, andinclude. The next figure shows the contents of these directories.
The bin directory contains several executables.
root |
shows the ROOT splash screen and calls root.exe |
root.exe |
the executable that root calls, if you use a debugger such as gdb, you will need to run root.exe directly |
rootcling |
is the utility ROOT uses to create a class dictionary for Cling |
rmkdepend |
a modified version of makedepend that is used by the ROOT build system |
root-config |
a script returning the needed compile flags and libraries for projects that compile and link with ROOT |
proofd |
a small daemon used to authenticate a user of ROOT parallel processing capability (PROOF) |
proofserv |
the actual PROOF process, which is started by proofd after a user, has successfully been authenticated |
rootd |
is the daemon for remote ROOT file access (see the TNetFile) |
There are several ways to use ROOT, one way is to run the executable by typing root at the system prompt another way is to link with the ROOT libraries and make the ROOT classes available in your own program.
Here is a short description of the most relevant libraries, the ones marked with a * are only installed when the options specified them.
libAsImage is the image manipulation library
libCling is the C++ interpreter (Cling)
libCore is the Base classes
libEG is the abstract event generator interface classes
*libEGPythia is the Pythia5 event generator interface
*libEGPythia6 is the Pythia6 event generator interface
libFitPanel contains the GUI used for fitting
libGed contains the GUI used for editing the properties of histograms, graphs, etc.
libGeom is the geometry package (with builder and painter)
libGpad is the pad and canvas classes which depend on low level graphics
libGraf is the 2D graphics primitives (can be used independent of libGpad)
libGraf3d is the 3D graphics primitives
libGui is the GUI classes (depend on low level graphics)
libGuiBld is the GUI designer
libGuiHtml contains the embedded HTML browser
libGX11 is the low level graphics interface to the X11 system
*libGX11TTF is an add-on library to libGX11 providing TrueType fonts
libHbook is for interface ROOT - HBOOK
libHist is the histogram classes (with accompanying painter library)
libHtml is the HTML documentation generation system
libMatrix is the matrix and vector manipulation
libMathCore contains the core mathematics and physics vector classes
libMathMore contains additional functions, interfacing the GSL math library
libMinuit is the MINUIT fitter
libNet contains functionality related to network transfer
libNew is the special global new/delete, provides extra memory checking and interface for shared memory (optional)
libPhysics contains the legacy physics classes (TLorentzVector, etc.)
libPostscript is the PostScript interface
libProof is the parallel ROOT Facility classes
libPython provides the interface to Python
*libRFIO is the interface to CERN RFIO remote I/O system.
*libRGL is the interface to OpenGL.
libReflex is the runtime type database library used by Cling
libRint is the interactive interface to ROOT (provides command prompt)
libRIO provides the functionality to write and read objects to and from ROOT files
libRooFit is the RooFit fitting framework
libRuby is the interface to Ruby
libSpectrum provides functionality for spectral analysis
*libThread is the interface to TThread classes
libTMVA contains the multivariate analysis toolkit
libTree is the TTree object container system
libTreePlayer is the TTree drawing classes
libTreeViewer is the graphical TTree query interface
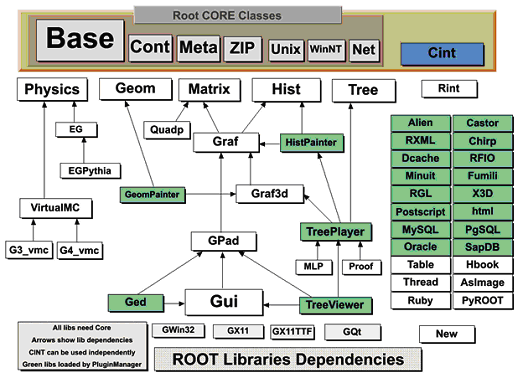
The libraries are designed and organized to minimize dependencies, such that you can load just enough code for the task at hand rather than having to load all libraries or one monolithic chunk. The core library (libCore.so) contains the essentials; it is a part of all ROOT applications. In the Figure 1-2 you see that libCore.so is made up of base classes, container classes, meta information classes, operating system specific classes, and the ZIP algorithm used for compression of the ROOT files.
The Cling library (libCling.so) is also needed in all ROOT applications, and even by libCore. A program referencing only TObject only needs libCore; libCling will be opened automatically. To add the ability to read and write ROOT objects one also has to load libRIO. As one would expect, none of that depends on graphics or the GUI.
Library dependencies have different consequences; depending on whether you try to build a binary, or you just try to access a class that is defined in a library.
When building your own executable you will have to link against the libraries that contain the classes you use. The ROOT reference guide states the library a class is reference guide defined in. Almost all relevant classes can be found in libraries returned by root-config -glibs; the graphics libraries are retuned by root-config --libs. These commands are commonly used in Makefiles. Using root-config instead of enumerating the libraries by hand allows you to link them in a platform independent way. Also, if ROOT library names change you will not need to change your Makefile.
A batch program that does not have a graphic display, which creates, fills, and saves histograms and trees, only needs to link the core libraries (libCore, libRIO), libHist and libTree. If ROOT needs access to other libraries, it loads them dynamically. For example, if the TreeViewer is used, libTreePlayer and all libraries libTreePlayer depends on are loaded also. The dependent libraries are shown in the ROOT reference guide’s library dependency graph. The difference between reference guide libHist and libHistPainter is that the former needs to be explicitly linked and the latter will be loaded automatically at runtime when ROOT needs it, by means of the Plugin Manager. plugin manager
In the Figure 1-2, the libraries represented by green boxes outside of the core are loaded via the plugin manager plugin manager or equivalent techniques, while the white ones are not. Of course, if one wants to access a plugin library directly, it has to be explicitly linked. An example of a plugin library is libMinuit. To create and fill histograms you need to link libHist.so. If the code has a call to fit the histogram, the “fitter” will dynamically load libMinuit if it is not yet loaded.
plugin manager The Plugin Manager TPluginManager allows postponing library dependencies to runtime: a plugin library will only be loaded when it is needed. Non-plugins will need to be linked, and are thus loaded at start-up. Plugins are defined by a base class (e.g. TFile) that will be implemented in a plugin, a tag used to identify the plugin (e.g. ^rfio: as part of the protocol string), the plugin class of which an object will be created (e.g. TRFIOFile), the library to be loaded (in short libRFIO.so to RFIO), and the constructor to be called (e.g. “TRFIOFile()”). This can be specified in the .rootrc which already contains many plugin definitions, or by calls to gROOT->GetPluginManager()->AddHandler().
When using a class in Cling, e.g. in an interpreted source file, ROOT will automatically load the library that defines this class. On start-up, ROOT parses all files ending on .rootmap rootmap that are in one of the $LD_LIBRARY_PATH (or $DYLD_LIBRARY_PATH for MacOS, or $PATH for Windows). They contain class names and the library names that the class depends on. After reading them, ROOT knows which classes are available, and which libraries to load for them.
When TSystem::Load("ALib") is called, ROOT uses this information to determine which libraries libALib.so depends on. It will load these libraries first. Otherwise, loading the requested library could cause a system (dynamic loader) error due to unresolved symbols.
tutorials The tutorials directory contains many example example scripts. They assume some basic knowledge of ROOT, and for the new user we recommend reading the chapters: “Histograms” and “Input/Output” before trying the examples. The more experienced user can jump to chapter “The Tutorials and Tests” to find more explicit and specific information about how to build and run the examples.
The $ROOTSYS/tutorials/ directory include the following sub-directories:
fft: Fast Fourier Transform with the fftw package fit: Several examples illustrating minimization/fitting foam: Random generator in multidimensional space geom: Examples of use of the geometry package (TGeo classes) gl: Visualisation with OpenGL graphics: Basic graphics graphs: Use of TGraph, TGraphErrors, etc. gui: Scripts to create Graphical User Interface hist: Histogramming image: Image Processing io: Input/Output math: Maths and Statistics functions matrix: Matrices (TMatrix) examples mlp: Neural networks with TMultiLayerPerceptron net: Network classes (client/server examples) physics: LorentzVectors, phase space pyroot: Python tutorials pythia: Example with pythia8 quadp: Quadratic Programming smatrix: Matrices with a templated package spectrum: Peak finder, background, deconvolutions splot: Example of the TSplot class (signal/background estimator) sql: Interfaces to SQL (mysql, oracle, etc) thread: Using Threads tmva: Examples of the MultiVariate Analysis classes tree: Creating Trees, Playing with Trees unuran: Interface with the unuram random generator library xml: Writing/Reading xml files
You can execute the scripts in $ROOTSYS/tutorials (or sub-directories) by setting your current directory in the script directory or from any user directory with write access. Several tutorials create new files. If you have write access to the tutorials directory, the new files will be created in the tutorials directory, otherwise they will be created in the user directory.
The test directory contains a set of examples example that represent all areas of the framework. When a new release is cut, the examples in this directory are compiled and run to test the new release’s backward compatibility. The list of source files is described in chapter “The Tutorials and Tests”.
The $ROOTSYS/test directory is a gold mine of ROOT-wisdom nuggets, and we encourage you to explore and exploit it. We recommend the new users to read the chapter “Getting Started”. The chapter “The Tutorials and Tests” has instructions on how to build all the programs and it goes over the examples Event and stress.
The include directory contains all header files. It is especially important because the header files contain the class definitions.
The directories we explored above are available when downloading the binaries. When downloading the source you also get a directory for each library with the corresponding header and source files, located in the inc and src subdirectories. To see what classes are in a library, you can check the <library>/inc directory for the list of class definitions. For example, the physics library libPhysics.so contains these class definitions:
> ls -m $ROOTSYS/math/physics/inc/
LinkDef.h, TFeldmanCousins.h, TGenPhaseSpace.h, TLorentzRotation.h,
TLorentzVector.h, TQuaternion.h, TRobustEstimator.h, TRolke.h,
TRotation.h, TVector2.h, TVector3.hwebsite The ROOT web site has up to date documentation. The ROOT source code automatically generates this documentation, so each class is explicitly documented on its own web page, which is always up to date with the latest official release of ROOT.
The ROOT Reference Guide web pages can be found at class index reference guide https://root.cern/doc/master/classes.html. Each page contains a class description, and an explanation of each method. It shows the class inheritance tree and lets you jump to the parent class page by clicking on the class name. If you want more details, you can even see the source. There is a help page available in the little box on the upper right hand side of each class documentation page. You can see on the next page what a typical class documentation web page looks like. The ROOT web site also contains in addition to this Reference Guide, “How To’s”, a list of publications and example applications.
The top of any class reference page lets you jump to different parts of the documentation. The first line links to the class index and the index for the current module (a group of classes, often a library). The second line links to the ROOT homepage and the class overviews. The third line links the source information - a HTML version of the source and header file as well as the CVS (the source management system used for the ROOT development) information of the files. The last line links the different parts of the current pages.