
 'MULTIDIMENSIONAL MODELS' RooFit tutorial macro #308
'MULTIDIMENSIONAL MODELS' RooFit tutorial macro #308
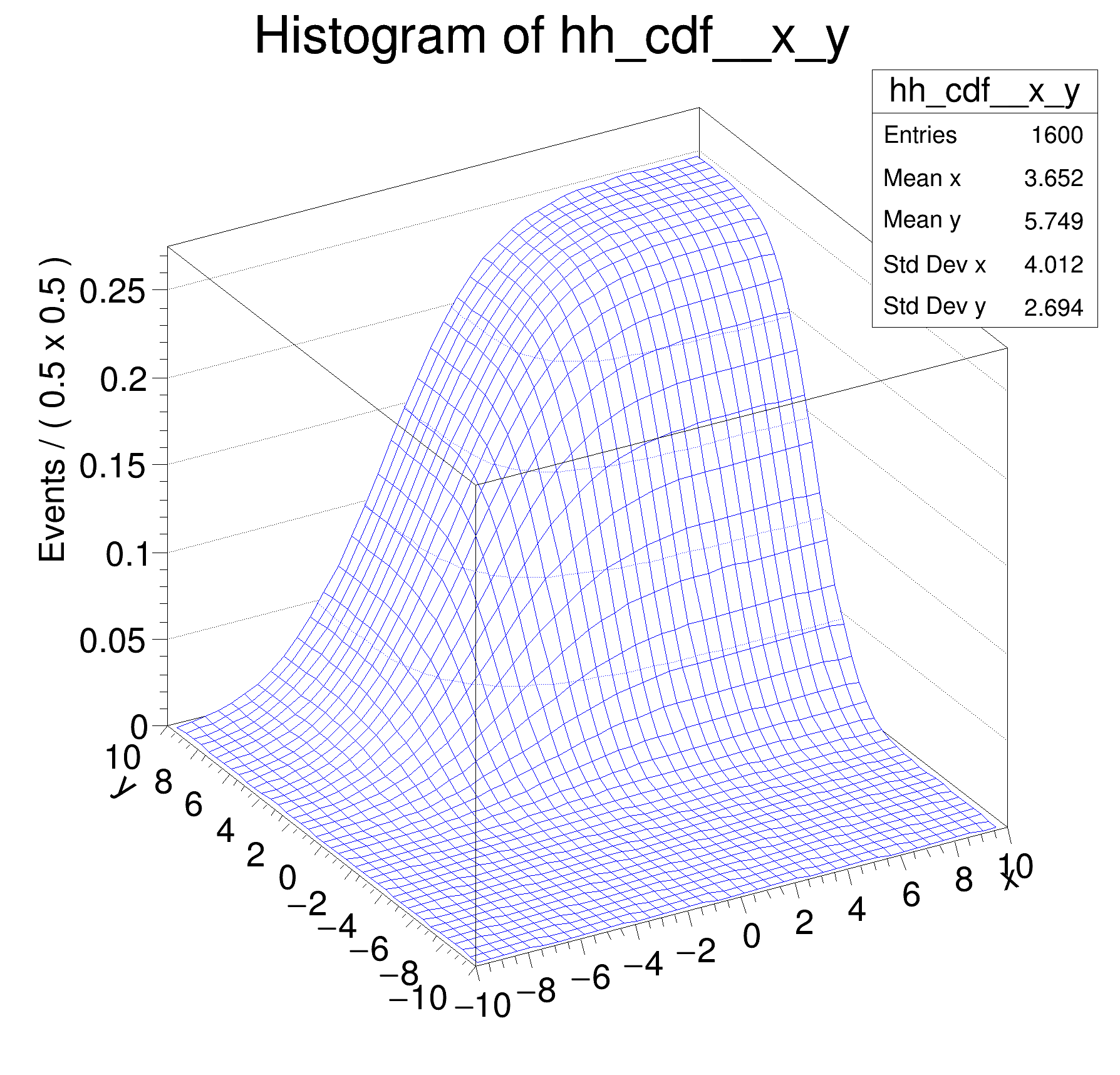
Examples on normalization of p.d.f.s, integration of p.d.fs, construction of cumulative distribution functions from p.d.f.s in two dimensions
Processing /mnt/build/workspace/root-makedoc-v614/rootspi/rdoc/src/v6-14-00-patches/tutorials/roofit/rf308_normintegration2d.C...
�[1mRooFit v3.60 -- Developed by Wouter Verkerke and David Kirkby�[0m
Copyright (C) 2000-2013 NIKHEF, University of California & Stanford University
All rights reserved, please read http://roofit.sourceforge.net/license.txt
gxy = 0.485672
gx_Norm[x,y] = 0.0129332
gx_Int[x,y] = 37.5523
gx_Norm[x] = 0.106896
gx_Norm[y] = 0.120989
[#1] INFO:Eval -- RooRealVar::setRange(x) new range named 'signal' created with bounds [-5,5]
[#1] INFO:Eval -- RooRealVar::setRange(y) new range named 'signal' created with bounds [-3,3]
gx_Int[x,y|signal]_Norm[x,y] = 0.572035
[#0] WARNING:InputArguments -- RooAbsReal::createHistogram(gxy_cdf_Int[x_prime,y_prime|CDF]_Norm[x_prime,y_prime]) WARNING extended mode requested for a non-pdf object, ignored
void rf308_normintegration2d()
{
cout << "gxy = " << gxy.getVal() << endl ;
cout << "gx_Norm[x,y] = " << gxy.getVal(&nset_xy) << endl ;
cout <<
"gx_Int[x,y] = " << igxy->
getVal() << endl ;
cout << "gx_Norm[x] = " << gxy.getVal(&nset_x) << endl ;
cout << "gx_Norm[y] = " << gxy.getVal(&nset_y) << endl ;
x.setRange("signal",-5,5) ;
y.setRange("signal",-3,3) ;
cout <<
"gx_Int[x,y|signal]_Norm[x,y] = " << igxy_sig->
getVal() << endl ;
new TCanvas(
"rf308_normintegration2d",
"rf308_normintegration2d",600,600) ;
}
- Author
- 07/2008 - Wouter Verkerke
Definition in file rf308_normintegration2d.C.

 ROOT 6.14/05 - Reference Guide Generated on Fri Nov 2 2018 10:58:54 (GVA Time) using Doxygen 1.8.13.
ROOT 6.14/05 - Reference Guide Generated on Fri Nov 2 2018 10:58:54 (GVA Time) using Doxygen 1.8.13.