library: libGeom
#include "TGeoVolume.h" |
TGeoVolumeAssembly
class description - source file - inheritance tree (.pdf)
public:
TGeoVolumeAssembly()
TGeoVolumeAssembly(const char* name)
TGeoVolumeAssembly(const TGeoVolumeAssembly&)
virtual ~TGeoVolumeAssembly()
static TClass* Class()
virtual TClass* IsA() const
virtual Bool_t IsAssembly() const
TGeoVolumeAssembly& operator=(const TGeoVolumeAssembly&)
virtual void ShowMembers(TMemberInspector& insp, char* parent)
virtual void Streamer(TBuffer& b)
void StreamerNVirtual(TBuffer& b)
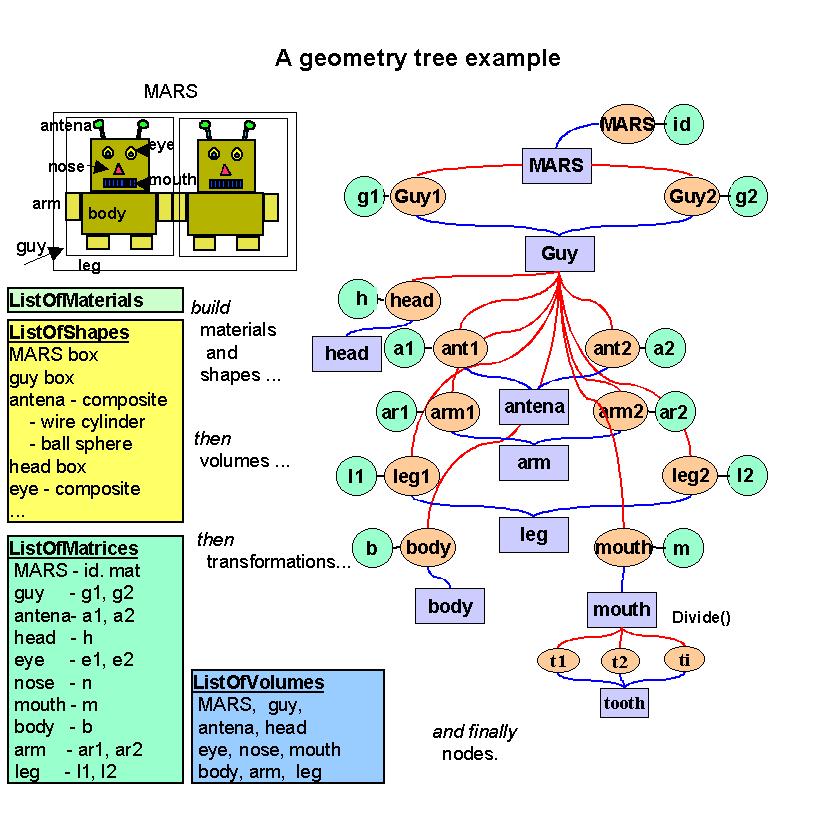
TGeoVolume - the base class representing solids.
Volumes are the basic objects used in building the geometrical hierarchy.
They represent unpositioned objects but store all information about the
placement of the other volumes they may contain. Therefore a volume can
be replicated several times in the geometry. In order to create a volume, one
has to put togeather a shape and a medium which are already defined. Volumes
have to be named by users at creation time. Every different name may represent a
an unique volume object, but may also represent more general a family (class)
of volume objects having the same shape type and medium, but possibly
different shape parameters. It is the user's task to provide different names
for different volume families in order to avoid ambiguities at tracking time.
A generic family rather than a single volume is created only in two cases :
when a generic shape is provided to the volume constructor or when a division
operation is applied. Each volume in the geometry stores an unique
ID corresponding to its family. In order to ease-up their creation, the manager
class is providing an API that allows making a shape and a volume in a single step.
Volumes are objects that can be visualized, therefore having visibility,
colour, line and fill attributes that can be defined or modified any time after
the volume creation. It is advisable however to define these properties just
after the first creation of a volume namespace, since in case of volume families
any new member created by the modeler inherits these properties.
In order to provide navigation features, volumes have to be able to find
the proper container of any point defined in the local reference frame. This
can be the volume itself, one of its positioned daughter volumes or none if
the point is actually outside. On the other hand, volumes have to provide also
other navigation methods such as finding the distances to its shape boundaries
or which daughter will be crossed first. The implementation of these features
is done at shape level, but the local mother-daughters management is handled
by volumes that builds additional optimisation structures upon geometry closure.
In order to have navigation features properly working one has to follow the
general rules for building a valid geometry (see TGeoManager class).
Now let's make a simple volume representing a copper wire. We suppose that
a medium is already created (see TGeoMedium class on how to create media).
We will create a TUBE shape for our wire, having Rmin=0cm, Rmax=0.01cm
and a half-length dZ=1cm :
TGeoTube *tube = new TGeoTube("wire_tube", 0, 0.01, 1);
One may ommit the name for the shape if no retreiving by name is further needed
during geometry building. The same shape can be shared by different volumes
having different names and materials. Now let's make the volume for our wire.
The prototype for volumes constructor looks like :
TGeoVolume::TGeoVolume(const char *name, TGeoShape *shape, TGeoMedium *med)
Since TGeoTube derives brom the base shape class, we can provide it to the volume
constructor :
TGeoVolume *wire_co = new TGeoVolume("WIRE_CO", tube, ptrCOPPER);
Do not bother to delete neither the media, shapes or volumes that you have
created since all will be automatically cleaned on exit by the manager class.
If we would have taken a look inside TGeoManager::MakeTube() method, we would
have been able to create our wire with a single line :
TGeoVolume *wire_co = gGeoManager->MakeTube("WIRE_CO", ptrCOPPER, 0, 0.01, 1);
The same applies for all primitive shapes, for which there can be found
corresponding MakeSHAPE() methods. Their usage is much more convenient unless
a shape has to be shared between more volumes. Let's make now an aluminium wire
having the same shape, supposing that we have created the copper wire with the
line above :
TGeoVolume *wire_al = new TGeoVolume("WIRE_AL", wire_co->GetShape(), ptrAL);
Now that we have learned how to create elementary volumes, let's see how we
can create a geometrical hierarchy.
Positioning volumes
-----------------------
When creating a volume one does not specify if this will contain or not other
volumes. Adding daughters to a volume implies creating those and adding them
one by one to the list of daughters. Since the volume has to know the position
of all its daughters, we will have to supply at the same time a geometrical
transformation with respect to its local reference frame for each of them.
The objects referencing a volume and a transformation are called NODES and
their creation is fully handled by the modeler. They represent the link
elements in the hierarchy of volumes. Nodes are unique and distinct geometrical
objects ONLY from their container point of view. Since volumes can be replicated
in the geometry, the same node may be found on different branches.
/*
 */
*/
An important observation is that volume objects are owned by the TGeoManager
class. This stores a list of all volumes in the geometry, that is cleaned
upon destruction.
Let's consider positioning now our wire in the middle of a gas chamber. We
need first to define the gas chamber :
TGeoVolume *chamber = gGeoManager->MakeTube("CHAMBER", ptrGAS, 0, 1, 1);
Now we can put the wire inside :
chamber->AddNode(wire_co, 1);
If we inspect now the chamber volume in a browser, we will notice that it has
one daughter. Of course the gas has some container also, but let's keep it like
that for the sake of simplicity. The full prototype of AddNode() is :
TGeoVolume::AddNode(TGeoVolume *daughter, Int_t usernumber,
TGeoMatrix *matrix=gGeoIdentity)
Since we did not supplied the third argument, the wire will be positioned with
an identity transformation inside the chamber. One will notice that the inner
radii of the wire and chamber are both zero - therefore, aren't the two volumes
overlapping ? The answer is no, the modeler is even relaying on the fact that
any daughter is fully contained by its mother. On the other hand, neither of
the nodes positioned inside a volume should overlap with each other. We will
see that there are allowed some exceptions to those rules.
Overlapping volumes
--------------------
Positioning volumes that does not overlap their neighbours nor extrude
their container is sometimes quite strong contrain. Some parts of the geometry
might overlap naturally, e.g. two crossing tubes. The modeller supports such
cases only if the overlapping nodes are declared by the user. In order to do
that, one should use TGeoVolume::AddNodeOverlap() instead of TGeoVolume::AddNode().
When 2 or more positioned volumes are overlapping, not all of them have to
be declared so, but at least one. A point inside an overlapping region equally
belongs to all overlapping nodes, but the way these are defined can enforce
the modeler to give priorities.
The general rule is that the deepest node in the hierarchy containing a point
have the highest priority. For the same geometry level, non-overlapping is
prioritized over overlapping. In order to illustrate this, we will consider
few examples. We will designate non-overlapping nodes as ONLY and the others
MANY as in GEANT3, where this concept was introduced:
1. The part of a MANY node B extruding its container A will never be "seen"
during navigation, as if B was in fact the result of the intersection of A and B.
2. If we have two nodes A (ONLY) and B (MANY) inside the same container, all
points in the overlapping region of A and B will be designated as belonging to A.
3. If A an B in the above case were both MANY, points in the overlapping
part will be designated to the one defined first. Both nodes must have the
same medium.
4. The silces of a divided MANY will be as well MANY.
One needs to know that navigation inside geometry parts MANY nodes is much
slower. Any overlapping part can be defined based on composite shapes - this
is always recommended.
TGeoVolumeAssembly()
:TGeoVolume()
TGeoVolumeAssembly(const char *name)
:TGeoVolume(name, NULL, NULL)
Inline Functions
void ~TGeoVolumeAssembly()
Bool_t IsAssembly() const
TClass* Class()
TClass* IsA() const
void ShowMembers(TMemberInspector& insp, char* parent)
void Streamer(TBuffer& b)
void StreamerNVirtual(TBuffer& b)
TGeoVolumeAssembly TGeoVolumeAssembly(const TGeoVolumeAssembly&)
TGeoVolumeAssembly& operator=(const TGeoVolumeAssembly&)
Author: Andrei Gheata 30/05/02
Last update: root/geom:$Name: $:$Id: TGeoVolume.cxx,v 1.50 2004/11/19 06:39:54 brun Exp $
Copyright (C) 1995-2000, Rene Brun and Fons Rademakers. *
ROOT page - Class index - Class Hierarchy - Top of the page
This page has been automatically generated. If you have any comments or suggestions about the page layout send a mail to ROOT support, or contact the developers with any questions or problems regarding ROOT.