 |
ROOT
Reference Guide |

|
| |
ROOT
Reference Guide |
|
Quaternion is a 4-component mathematic object quite convenient when dealing with space rotation (or reference frame transformation).
In short, think of quaternion Q as a 3-vector augmented by a real number. \( Q = Q|_r + Q|_V \)
Quaternion multiplication is given by :
\[ Q.Q' = (Q|_r + Q|_V )*( Q'|_r + Q'|_V) = [ Q|_r*Q'|_r - Q|_V*Q'|_V ] + [ Q|_r*Q'|_V + Q'|_r*Q|_V + Q|_V X Q'|_V ] \]
where :
Thus, quaternion product is a generalization of real number product and product of a vector by a real number. Product of two pure vectors gives a quaternion whose real part is the opposite of scalar product and the vector part the cross product.
The conjugate of a quaternion \( Q = Q|r + Q|V \) is \( \bar{Q} = Q|r - Q|V \)
The magnitude of a quaternion \( Q \) is given by \( |Q|^2 = Q.\bar{Q} = \bar{Q}.Q = Q^2|r + |Q|V|^2 \)
Therefore, the inverse of a quaternion is \( Q-1 = \bar{Q} /|Q|^2 \)
"unit" quaternion is a quaternion of magnitude 1 : \( |Q|^2 = 1. \) Unit quaternions are a subset of the quaternions set.
A rotation of angle \( f \) around a given axis, is represented by a unit quaternion Q :
In other words : \( Q = Q|_r + Q|_V = cos(\frac{f}{2}) + sin(\frac{f}{2}) \). (where u is a unit vector // to the rotation axis, \( cos(\frac{f}{2}) \) is the real part, \( sin(\frac{f}{2}) \) .u is the vector part) Note : The quaternion of identity is \( Q_I = cos(0) + sin(0)*(AnyVector) = 1\) .
The composition of two rotations is described by the product of the two corresponding quaternions. As for 3-space rotations, quaternion multiplication is not commutative !
\( Q = Q_1.Q_2 \) represents the composition of the successive rotation R1 and R2 expressed in the current frame (the axis of rotation hold by \( Q_2 \) is expressed in the frame as it is after R1 rotation). \( Q = Q_2.Q_1 \) represents the composition of the successive rotation R1 and R2 expressed in the initial reference frame.
The inverse of a rotation is a rotation about the same axis but of opposite angle, thus if Q is a unit quaternion, \( Q = cos(\frac{f}{2}) + sin(\frac{f}{2}).u = Q|_r + Q|_V\) , then : \( Q^{-1} =cos(-\frac{f}{2}) + sin(-\frac{f}{2}).u = cos(\frac{f}{2}) - sin(\frac{f}{2}).u = Q|_r -Q|_V \) is its inverse quaternion.
One verifies that : \( Q.Q^{-1} = Q^{-1}.Q = Q|_r*Q|_r + Q|_V*Q|_V + Q|_r*Q|_V -Q|_r*Q|_V + Q|_VXQ|_V = Q\leq|_r + Q\leq|_V = 1 \)
The rotation of a vector V by the rotation described by a unit quaternion Q is obtained by the following operation : \( V' = Q*V*Q^{-1} \), considering V as a quaternion whose real part is null.
Numerically, the quaternion multiplication involves 12 additions and 16 multiplications. It is therefore faster than 3x3 matrixes multiplication involving 18 additions and 27 multiplications.
On the contrary, rotation of a vector by the above formula ( \( Q*V*Q^{-1} \) ) involves 18 additions and 24 multiplications, whereas multiplication of a 3-vector by a 3x3 matrix involves only 6 additions and 9 multiplications.
When dealing with numerous composition of space rotation, it is therefore faster to use quaternion product. On the other hand if a huge set of vectors must be rotated by a given quaternion, it is more optimized to convert the quaternion into a rotation matrix once, and then use that later to rotate the set of vectors.
http://en.wikipedia.org/wiki/Quaternions_and_spatial_rotation
http://en.wikipedia.org/wiki/Quaternion
This Class represents all quaternions (unit or non-unit) It possesses a Normalize() method to make a given quaternion unit The Rotate(TVector3&) and Rotation(TVector3&) methods can be used even for a non-unit quaternion, in that case, the proper normalization is applied to perform the rotation.
A TRotation constructor exists than takes a quaternion for parameter (even non-unit), in that cas the proper normalisation is applied.
Definition at line 11 of file TQuaternion.h.
Public Types | |
| enum | { kIsOnHeap = 0x01000000 , kNotDeleted = 0x02000000 , kZombie = 0x04000000 , kInconsistent = 0x08000000 , kBitMask = 0x00ffffff } |
| enum | { kSingleKey = (1ULL << ( 0 )) , kOverwrite = (1ULL << ( 1 )) , kWriteDelete = (1ULL << ( 2 )) } |
| enum | EDeprecatedStatusBits { kObjInCanvas = (1ULL << ( 3 )) } |
| enum | EStatusBits { kCanDelete = (1ULL << ( 0 )) , kMustCleanup = (1ULL << ( 3 )) , kIsReferenced = (1ULL << ( 4 )) , kHasUUID = (1ULL << ( 5 )) , kCannotPick = (1ULL << ( 6 )) , kNoContextMenu = (1ULL << ( 8 )) , kInvalidObject = (1ULL << ( 13 )) } |
Public Member Functions | |
| TQuaternion (const Double_t *) | |
| TQuaternion (const Float_t *) | |
| TQuaternion (const TQuaternion &) noexcept | |
| TQuaternion (const TVector3 &vector, Double_t real=0) | |
| TQuaternion (Double_t real=0, Double_t X=0, Double_t Y=0, Double_t Z=0) | |
| ~TQuaternion () override | |
| void | AbstractMethod (const char *method) const |
| Call this function within a function that you don't want to define as purely virtual, in order not to force all users deriving from that class to implement that maybe (on their side) unused function; but at the same time, emit a run-time warning if they try to call it, telling that it is not implemented in the derived class: action must thus be taken on the user side to override it. | |
| virtual void | AppendPad (Option_t *option="") |
| Append graphics object to current pad. | |
| virtual void | Browse (TBrowser *b) |
| Browse object. May be overridden for another default action. | |
| ULong_t | CheckedHash () |
| Check and record whether this class has a consistent Hash/RecursiveRemove setup (*) and then return the regular Hash value for this object. | |
| virtual const char * | ClassName () const |
| Returns name of class to which the object belongs. | |
| virtual void | Clear (Option_t *="") |
| virtual TObject * | Clone (const char *newname="") const |
| Make a clone of an object using the Streamer facility. | |
| virtual Int_t | Compare (const TObject *obj) const |
| Compare abstract method. | |
| TQuaternion | Conjugate () const |
| virtual void | Copy (TObject &object) const |
| Copy this to obj. | |
| virtual void | Delete (Option_t *option="") |
| Delete this object. | |
| virtual Int_t | DistancetoPrimitive (Int_t px, Int_t py) |
| Computes distance from point (px,py) to the object. | |
| TQuaternion & | DivideLeft (const TQuaternion &quaternion) |
| left division | |
| TQuaternion & | DivideLeft (const TVector3 &vector) |
| left division | |
| virtual void | Draw (Option_t *option="") |
| Default Draw method for all objects. | |
| virtual void | DrawClass () const |
| Draw class inheritance tree of the class to which this object belongs. | |
| virtual TObject * | DrawClone (Option_t *option="") const |
Draw a clone of this object in the current selected pad with: gROOT->SetSelectedPad(c1). | |
| virtual void | Dump () const |
| Dump contents of object on stdout. | |
| virtual void | Error (const char *method, const char *msgfmt,...) const |
| Issue error message. | |
| virtual void | Execute (const char *method, const char *params, Int_t *error=nullptr) |
| Execute method on this object with the given parameter string, e.g. | |
| virtual void | Execute (TMethod *method, TObjArray *params, Int_t *error=nullptr) |
| Execute method on this object with parameters stored in the TObjArray. | |
| virtual void | ExecuteEvent (Int_t event, Int_t px, Int_t py) |
| Execute action corresponding to an event at (px,py). | |
| virtual void | Fatal (const char *method, const char *msgfmt,...) const |
| Issue fatal error message. | |
| virtual TObject * | FindObject (const char *name) const |
| Must be redefined in derived classes. | |
| virtual TObject * | FindObject (const TObject *obj) const |
| Must be redefined in derived classes. | |
| virtual Option_t * | GetDrawOption () const |
| Get option used by the graphics system to draw this object. | |
| virtual const char * | GetIconName () const |
| Returns mime type name of object. | |
| virtual const char * | GetName () const |
| Returns name of object. | |
| virtual char * | GetObjectInfo (Int_t px, Int_t py) const |
| Returns string containing info about the object at position (px,py). | |
| virtual Option_t * | GetOption () const |
| Double_t | GetQAngle () const |
| Get angle of quaternion (rad) N.B : this angle is half of the corresponding rotation angle. | |
| void | GetRXYZ (Double_t *carray) const |
| void | GetRXYZ (Float_t *carray) const |
| virtual const char * | GetTitle () const |
| Returns title of object. | |
| virtual UInt_t | GetUniqueID () const |
| Return the unique object id. | |
| virtual Bool_t | HandleTimer (TTimer *timer) |
| Execute action in response of a timer timing out. | |
| virtual ULong_t | Hash () const |
| Return hash value for this object. | |
| Bool_t | HasInconsistentHash () const |
| Return true is the type of this object is known to have an inconsistent setup for Hash and RecursiveRemove (i.e. | |
| virtual void | Info (const char *method, const char *msgfmt,...) const |
| Issue info message. | |
| virtual Bool_t | InheritsFrom (const char *classname) const |
| Returns kTRUE if object inherits from class "classname". | |
| virtual Bool_t | InheritsFrom (const TClass *cl) const |
| Returns kTRUE if object inherits from TClass cl. | |
| virtual void | Inspect () const |
| Dump contents of this object in a graphics canvas. | |
| TQuaternion | Invert () const |
| invert | |
| void | InvertBit (UInt_t f) |
| TClass * | IsA () const override |
| Bool_t | IsDestructed () const |
| IsDestructed. | |
| virtual Bool_t | IsEqual (const TObject *obj) const |
| Default equal comparison (objects are equal if they have the same address in memory). | |
| virtual Bool_t | IsFolder () const |
| Returns kTRUE in case object contains browsable objects (like containers or lists of other objects). | |
| R__ALWAYS_INLINE Bool_t | IsOnHeap () const |
| virtual Bool_t | IsSortable () const |
| R__ALWAYS_INLINE Bool_t | IsZombie () const |
| TQuaternion | LeftProduct (const TQuaternion &quaternion) const |
| left product | |
| TQuaternion | LeftProduct (const TVector3 &vector) const |
| left product | |
| TQuaternion | LeftQuotient (const TQuaternion &quaternion) const |
| left quotient | |
| TQuaternion | LeftQuotient (const TVector3 &vector) const |
| left quotient | |
| virtual void | ls (Option_t *option="") const |
| The ls function lists the contents of a class on stdout. | |
| void | MayNotUse (const char *method) const |
| Use this method to signal that a method (defined in a base class) may not be called in a derived class (in principle against good design since a child class should not provide less functionality than its parent, however, sometimes it is necessary). | |
| TQuaternion & | MultiplyLeft (const TQuaternion &quaternion) |
| left multiplication | |
| TQuaternion & | MultiplyLeft (const TVector3 &vector) |
| left multiplication | |
| Double_t | Norm () const |
| Double_t | Norm2 () const |
| TQuaternion & | Normalize () |
| virtual Bool_t | Notify () |
| This method must be overridden to handle object notification (the base implementation is no-op). | |
| void | Obsolete (const char *method, const char *asOfVers, const char *removedFromVers) const |
| Use this method to declare a method obsolete. | |
| void | operator delete (void *, size_t) |
| Operator delete for sized deallocation. | |
| void | operator delete (void *ptr) |
| Operator delete. | |
| void | operator delete (void *ptr, void *vp) |
| Only called by placement new when throwing an exception. | |
| void | operator delete[] (void *, size_t) |
| Operator delete [] for sized deallocation. | |
| void | operator delete[] (void *ptr) |
| Operator delete []. | |
| void | operator delete[] (void *ptr, void *vp) |
| Only called by placement new[] when throwing an exception. | |
| void * | operator new (size_t sz) |
| void * | operator new (size_t sz, void *vp) |
| void * | operator new[] (size_t sz) |
| void * | operator new[] (size_t sz, void *vp) |
| Bool_t | operator!= (const TQuaternion &) const |
| Bool_t | operator!= (const TVector3 &) const |
| Bool_t | operator!= (Double_t r) const |
| Double_t & | operator() (int) |
| dereferencing operator | |
| Double_t | operator() (int) const |
| dereferencing operator const | |
| TQuaternion | operator* (const TQuaternion &quaternion) const |
| right product | |
| TQuaternion | operator* (const TVector3 &vector) const |
| right product | |
| TQuaternion | operator* (Double_t real) const |
| product of quaternion with a real | |
| TQuaternion & | operator*= (const TQuaternion &quaternion) |
| right multiplication | |
| TQuaternion & | operator*= (const TVector3 &vector) |
| right multiplication | |
| TQuaternion & | operator*= (Double_t real) |
| TQuaternion | operator+ (const TQuaternion &quaternion) const |
| TQuaternion | operator+ (const TVector3 &vector) const |
| sum of quaternion with a real | |
| TQuaternion | operator+ (Double_t real) const |
| sum of quaternion with a real | |
| TQuaternion & | operator+= (const TQuaternion &quaternion) |
| TQuaternion & | operator+= (const TVector3 &vector) |
| TQuaternion & | operator+= (Double_t real) |
| TQuaternion | operator- () const |
| TQuaternion | operator- (const TQuaternion &quaternion) const |
| TQuaternion | operator- (const TVector3 &vector) const |
| subtraction of real to quaternion | |
| TQuaternion | operator- (Double_t real) const |
| subtraction of real to quaternion | |
| TQuaternion & | operator-= (const TQuaternion &quaternion) |
| TQuaternion & | operator-= (const TVector3 &vector) |
| TQuaternion & | operator-= (Double_t real) |
| TQuaternion | operator/ (const TQuaternion &quaternion) const |
| right quotient | |
| TQuaternion | operator/ (const TVector3 &vector) const |
| right quotient | |
| TQuaternion | operator/ (Double_t real) const |
| division by a real | |
| TQuaternion & | operator/= (const TQuaternion &quaternion) |
| right division | |
| TQuaternion & | operator/= (const TVector3 &vector) |
| right division | |
| TQuaternion & | operator/= (Double_t real) |
| TQuaternion & | operator= (const TQuaternion &) |
| TQuaternion & | operator= (const TVector3 &) noexcept |
| TQuaternion & | operator= (Double_t r) |
| Bool_t | operator== (const TQuaternion &) const |
| Bool_t | operator== (const TVector3 &) const |
| Bool_t | operator== (Double_t r) const |
| Double_t & | operator[] (int) |
| Double_t | operator[] (int) const |
| virtual void | Paint (Option_t *option="") |
| This method must be overridden if a class wants to paint itself. | |
| virtual void | Pop () |
| Pop on object drawn in a pad to the top of the display list. | |
| void | Print (Option_t *option="") const override |
| Print Quaternion parameters. | |
| Double_t | QMag () const |
| Double_t | QMag2 () const |
| virtual Int_t | Read (const char *name) |
| Read contents of object with specified name from the current directory. | |
| virtual void | RecursiveRemove (TObject *obj) |
| Recursively remove this object from a list. | |
| void | ResetBit (UInt_t f) |
| void | Rotate (TVector3 &vect) const |
| rotate vect by current quaternion | |
| TVector3 | Rotation (const TVector3 &vect) const |
| rotation of vect by current quaternion | |
| virtual void | SaveAs (const char *filename="", Option_t *option="") const |
| Save this object in the file specified by filename. | |
| virtual void | SavePrimitive (std::ostream &out, Option_t *option="") |
| Save a primitive as a C++ statement(s) on output stream "out". | |
| TQuaternion & | SetAxisQAngle (TVector3 &v, Double_t QAngle) |
| set quaternion from vector and angle (rad) quaternion is set as unitary N.B : this angle is half of the corresponding rotation angle | |
| void | SetBit (UInt_t f) |
| void | SetBit (UInt_t f, Bool_t set) |
| Set or unset the user status bits as specified in f. | |
| virtual void | SetDrawOption (Option_t *option="") |
| Set drawing option for object. | |
| TQuaternion & | SetQAngle (Double_t angle) |
| Set angle of quaternion (rad) - keep quaternion norm N.B : this angle is half of the corresponding rotation angle. | |
| TQuaternion & | SetRV (Double_t r, TVector3 &vect) |
| TQuaternion & | SetRXYZ (Double_t r, Double_t x, Double_t y, Double_t z) |
| virtual void | SetUniqueID (UInt_t uid) |
| Set the unique object id. | |
| void | Streamer (TBuffer &) override |
| Stream an object of class TObject. | |
| void | StreamerNVirtual (TBuffer &ClassDef_StreamerNVirtual_b) |
| virtual void | SysError (const char *method, const char *msgfmt,...) const |
| Issue system error message. | |
| R__ALWAYS_INLINE Bool_t | TestBit (UInt_t f) const |
| Int_t | TestBits (UInt_t f) const |
| virtual void | UseCurrentStyle () |
| Set current style settings in this object This function is called when either TCanvas::UseCurrentStyle or TROOT::ForceStyle have been invoked. | |
| virtual void | Warning (const char *method, const char *msgfmt,...) const |
| Issue warning message. | |
| virtual Int_t | Write (const char *name=nullptr, Int_t option=0, Int_t bufsize=0) |
| Write this object to the current directory. | |
| virtual Int_t | Write (const char *name=nullptr, Int_t option=0, Int_t bufsize=0) const |
| Write this object to the current directory. | |
Static Public Member Functions | |
| static TClass * | Class () |
| static const char * | Class_Name () |
| static constexpr Version_t | Class_Version () |
| static const char * | DeclFileName () |
| static Longptr_t | GetDtorOnly () |
| Return destructor only flag. | |
| static Bool_t | GetObjectStat () |
| Get status of object stat flag. | |
| static void | SetDtorOnly (void *obj) |
| Set destructor only flag. | |
| static void | SetObjectStat (Bool_t stat) |
| Turn on/off tracking of objects in the TObjectTable. | |
Public Attributes | |
| Double_t | fRealPart |
| TVector3 | fVectorPart |
Protected Types | |
| enum | { kOnlyPrepStep = (1ULL << ( 3 )) } |
Protected Member Functions | |
| virtual void | DoError (int level, const char *location, const char *fmt, va_list va) const |
| Interface to ErrorHandler (protected). | |
| void | MakeZombie () |
Static Protected Member Functions | |
| static void | SavePrimitiveConstructor (std::ostream &out, TClass *cl, const char *variable_name, const char *constructor_agrs="", Bool_t empty_line=kTRUE) |
| Save object constructor in the output stream "out". | |
| static void | SavePrimitiveDraw (std::ostream &out, const char *variable_name, Option_t *option=nullptr) |
| Save invocation of primitive Draw() method Skipped if option contains "nodraw" string. | |
| static TString | SavePrimitiveVector (std::ostream &out, const char *prefix, Int_t len, Double_t *arr, Int_t flag=0) |
| Save array in the output stream "out" as vector. | |
Static Private Member Functions | |
| static void | AddToTObjectTable (TObject *) |
| Private helper function which will dispatch to TObjectTable::AddObj. | |
Private Attributes | |
| UInt_t | fBits |
| bit field status word | |
| UInt_t | fUniqueID |
| object unique identifier | |
Static Private Attributes | |
| static Longptr_t | fgDtorOnly = 0 |
| object for which to call dtor only (i.e. no delete) | |
| static Bool_t | fgObjectStat = kTRUE |
| if true keep track of objects in TObjectTable | |
#include <TQuaternion.h>
| Enumerator | |
|---|---|
| kOnlyPrepStep | Used to request that the class specific implementation of This is just for example by TBufferMerger to request that the TTree inside the file calls |
|
inherited |
|
inherited |
| Enumerator | |
|---|---|
| kCanDelete | if object in a list can be deleted |
| kMustCleanup | if object destructor must call RecursiveRemove() |
| kIsReferenced | |
| kHasUUID | if object has a TUUID (its fUniqueID=UUIDNumber) |
| kCannotPick | if object in a pad cannot be picked |
| kNoContextMenu | if object does not want context menu |
| kInvalidObject | if object ctor succeeded but object should not be used |
Definition at line 113 of file TQuaternion.cxx.
Definition at line 104 of file TQuaternion.cxx.
Definition at line 107 of file TQuaternion.cxx.
Definition at line 110 of file TQuaternion.cxx.
|
noexcept |
Definition at line 101 of file TQuaternion.cxx.
|
override |
Definition at line 116 of file TQuaternion.cxx.
|
inherited |
Call this function within a function that you don't want to define as purely virtual, in order not to force all users deriving from that class to implement that maybe (on their side) unused function; but at the same time, emit a run-time warning if they try to call it, telling that it is not implemented in the derived class: action must thus be taken on the user side to override it.
In other word, this method acts as a "runtime purely virtual" warning instead of a "compiler purely virtual" error.
Definition at line 1149 of file TObject.cxx.
|
staticprivateinherited |
Private helper function which will dispatch to TObjectTable::AddObj.
Included here to avoid circular dependency between header files.
Definition at line 195 of file TObject.cxx.
|
virtualinherited |
Append graphics object to current pad.
In case no current pad is set yet, create a default canvas with the name "c1".
Definition at line 204 of file TObject.cxx.
|
virtualinherited |
Browse object. May be overridden for another default action.
Reimplemented in TASImage, TRecorder, TEfficiency, TGraph2D, TChain, TTree, TDirectory, TFolder, TMacro, TRemoteObject, TROOT, TStyle, TSystemDirectory, TSystemFile, TTask, TCollection, TPair, TBrowserObject, TBaseClass, TClass, TGeoManager, TGeoNode, TGeoVolume, TGeoOverlap, TGeoTrack, TCanvas, TPad, TAxis3D, TRootIconList, THbookBranch, THbookFile, THbookKey, TF1, TGraph, TH1, THnBase, ROOT::Internal::THnBaseBrowsable, THStack, TMultiDimFit, TMultiGraph, TPrincipal, TDirectoryFile, TKey, TKeyMapFile, TMapFile, TSPlot, TDatabasePDG, TGenerator, TParticleClassPDG, TApplicationRemote, RooPlot, TBranch, TVirtualBranchBrowsable, TCollectionPropertyBrowsable, TBranchClones, TBranchElement, TBranchObject, TBranchSTL, TLeaf, TNtuple, TNtupleD, TTreePerfStats, and ROOT::Experimental::XRooFit::xRooNode.
Definition at line 218 of file TObject.cxx.
|
inlineinherited |
Check and record whether this class has a consistent Hash/RecursiveRemove setup (*) and then return the regular Hash value for this object.
The intent is for this routine to be called instead of directly calling the function Hash during "insert" operations. See TObject::HasInconsistenTObjectHash();
(*) The setup is consistent when all classes in the class hierarchy that overload TObject::Hash do call ROOT::CallRecursiveRemoveIfNeeded in their destructor. i.e. it is safe to call the Hash virtual function during the RecursiveRemove operation.
Definition at line 113 of file TQuaternion.h.
|
virtualinherited |
Returns name of class to which the object belongs.
Definition at line 227 of file TObject.cxx.
Reimplemented in TMVA::ResultsClassification, TMVA::ResultsMulticlass, TMVA::ResultsRegression, TMVA::ResultsClassification, TMVA::ResultsMulticlass, TMVA::ResultsRegression, TMrbSubevent_Caen, TNotifyLinkBase, TRefTable, ROOT::TSchemaRule, TGTextEdit, TGTextView, TGView, TGHtml, TStreamerInfo, TMatrixT< Element >, TMatrixT< AReal >, TMatrixT< Double_t >, TMatrixTSparse< Element >, TMatrixTSparse< Double_t >, TMatrixTSym< Element >, TMatrixTSym< Double_t >, TVectorT< Element >, TVectorT< Double_t >, TVirtualStreamerInfo, TMVA::MinuitWrapper, RooLinkedList, TUsrHitBuffer, TFumili, TListOfEnums, TListOfEnumsWithLock, TDirectory, TFolder, TNamed, TProcessID, TTask, TBits, TBtree, TClonesArray, THashList, THashTable, TList, TMap, TObjArray, TOrdCollection, TRefArray, TDictAttributeMap, TListOfDataMembers, TListOfFunctions, TListOfFunctionTemplates, TViewPubDataMembers, TViewPubFunctions, TGeoRotation, TGeoCombiTrans, TGeoGenTrans, TGeoHMatrix, TCanvas, TPad, TLegend, TPaveText, TGTextEntry, TBackCompFitter, TFormula, TGraph2D, TMultiDimFit, TPrincipal, ROOT::v5::TFormula, TFitter, TLinearFitter, TBranchRef, TEventList, JetEvent, TVirtualPad, TCollection, TVirtualFitter, TMatrixTBase< Element >, TMatrixTBase< AReal >, and TMatrixTBase< Double_t >.
Make a clone of an object using the Streamer facility.
If the object derives from TNamed, this function is called by TNamed::Clone. TNamed::Clone uses the optional argument to set a new name to the newly created object.
If the object class has a DirectoryAutoAdd function, it will be called at the end of the function with the parameter gDirectory. This usually means that the object will be appended to the current ROOT directory.
Reimplemented in TMVA::MinuitWrapper, RooCatType, TImage, RooStudyPackage, RooLinkedList, RooStats::ModelConfig, TNamed, TCollection, TClass, TFunction, TFunctionTemplate, TMethod, TMethodCall, TASImage, TH1, TStreamerInfo, TMinuit, RooAbsStudy, RooDataHist, RooDataSet, RooWorkspace, TChainIndex, TTreeIndex, TF1, RooAbsArg, RooAbsBinning, RooAbsCollection, RooCmdArg, RooFitResult, RooTemplateProxy< T >, RooTemplateProxy< const RooHistFunc >, RooTemplateProxy< RooAbsCategory >, RooTemplateProxy< RooAbsPdf >, RooTemplateProxy< RooAbsReal >, RooTemplateProxy< RooAbsRealLValue >, RooTemplateProxy< RooMultiCategory >, RooTemplateProxy< RooRealVar >, and RooStats::HypoTestResult.
Definition at line 243 of file TObject.cxx.
Compare abstract method.
Must be overridden if a class wants to be able to compare itself with other objects. Must return -1 if this is smaller than obj, 0 if objects are equal and 1 if this is larger than obj.
Reimplemented in TEnvRec, TFileInfo, TNamed, TObjString, TParameter< AParamType >, TParameter< Long64_t >, TUrl, TCollection, TGeoBranchArray, TGeoOverlap, TStructNode, TStructNodeProperty, TGFSFrameElement, TGLBFrameElement, RooAbsArg, and RooDouble.
Definition at line 258 of file TObject.cxx.
|
inline |
Definition at line 283 of file TQuaternion.h.
|
virtualinherited |
Copy this to obj.
Reimplemented in TDirectory, TFolder, TSystemDirectory, TSystemFile, TGTextEdit, TGTextView, TDirectoryFile, TFile, TArc, TArrow, TAxis, TBox, TColor, TCrown, TEllipse, TF1, TFormula, TF12, TF2, TF3, ROOT::v5::TFormula, TFrame, TAxis3D, TH1, TH1C, TH1S, TH1I, TH1L, TH1F, TH1D, TH2, TH2C, TH2S, TH2I, TH2L, TH2F, TH2D, TH3, TH3C, TH3S, TH3I, TH3L, TH3F, TH3D, TProfile, TProfile2D, TProfile3D, TLine, TMarker, TNamed, TH2Poly, TLegend, TLegendEntry, TF1Convolution, TF1NormSum, TF1AbsComposition, TPaletteAxis, TPave, TPaveLabel, TPaveClass, TPolyLine, TPolyLine3D, TPolyMarker3D, TPolyMarker, TPieSlice, TStyle, TLatex, TMathText, TText, and TWbox.
Definition at line 159 of file TObject.cxx.
Definition at line 113 of file TQuaternion.h.
|
virtualinherited |
Delete this object.
Typically called as a command via the interpreter. Normally use "delete" operator when object has been allocated on the heap.
Reimplemented in TDirectory, TDirectoryFile, TFile, TSystemDirectory, TSystemFile, TTreeViewer, TGItemContext, TCanvas, TGFrame, TGTextEdit, TAxis, RooLinkedList, TExMap, TObjectTable, TProtoClass, TKeySQL, TKeyXML, TQCommand, TBtree, TClonesArray, THashList, THashTable, TList, TMap, TObjArray, TOrdCollection, TRefArray, TListOfDataMembers, TListOfEnums, TListOfEnumsWithLock, TListOfFunctions, TListOfFunctionTemplates, TViewPubDataMembers, TViewPubFunctions, TThread, TKey, TMVA::Results, TTree, and TCollection.
Definition at line 268 of file TObject.cxx.
Computes distance from point (px,py) to the object.
This member function must be implemented for each graphics primitive. This default function returns a big number (999999).
Reimplemented in TGeoTessellated, TStyle, TGeoBBox, TGeoCompositeShape, TGeoCone, TGeoConeSeg, TGeoEltu, TGeoHalfSpace, TGeoHype, TGeoNode, TGeoParaboloid, TGeoPcon, TGeoPgon, TGeoScaledShape, TGeoShapeAssembly, TGeoSphere, TGeoTorus, TGeoTube, TGeoTubeSeg, TGeoVolume, TGeoXtru, TGeoOverlap, TGeoTrack, TGeoVGShape, TASImage, TColorWheel, TPad, TBox, TCrown, TCurlyArc, TCurlyLine, TDiamond, TEllipse, TGraphPolargram, TLine, TMarker, TPave, TPie, TPolyLine, TText, TGraphEdge, TGraphNode, TAxis3D, TMarker3DBox, TPolyLine3D, TPolyMarker3D, TGL5DDataSet, TGLHistPainter, TGLParametricEquation, TGLTH3Composition, TGLViewer, TAxis, TEfficiency, TF1, TF2, TF3, TGraph, TGraph2D, TH1, THStack, TMultiGraph, TPolyMarker, TScatter, TScatter2D, TSpline, THistPainter, TPaletteAxis, TGenerator, TParticle, TPrimary, TFileDrawMap, TTreePerfStats, TParallelCoord, TParallelCoordRange, TParallelCoordVar, TSpider, TGeoShape, TPoints3DABC, TVirtualHistPainter, TPieSlice, and TGLScenePad.
Definition at line 284 of file TObject.cxx.
| TQuaternion & TQuaternion::DivideLeft | ( | const TQuaternion & | quaternion | ) |
left division
Definition at line 412 of file TQuaternion.cxx.
| TQuaternion & TQuaternion::DivideLeft | ( | const TVector3 & | vector | ) |
left division
Definition at line 288 of file TQuaternion.cxx.
|
protectedvirtualinherited |
Interface to ErrorHandler (protected).
Reimplemented in TTreeViewer, and TThread.
Definition at line 1059 of file TObject.cxx.
|
virtualinherited |
Default Draw method for all objects.
Reimplemented in TClassTree, ROOT::RGeoPainter, TGListTree, TGPicture, TMultiDimFit, TRatioPlot, TGraph, TGraphTime, THStack, TMultiGraph, TChain, TTree, TFITSHDU, TEfficiency, RooStats::HypoTestInverterPlot, ROOT::Experimental::XRooFit::xRooNLLVar::xRooHypoPoint, ROOT::Experimental::XRooFit::xRooNLLVar::xRooHypoSpace, ROOT::Experimental::XRooFit::xRooNode, TGeoParallelWorld, TDirectory, TCollection, TBrowser, TClass, TGeoBatemanSol, TGeoNode, TGeoPhysicalNode, TGeoPolygon, TGeoShape, TGeoVolume, TGeoOverlap, TGeoPainter, TGeoTrack, TGeoVGShape, TASImage, TButton, TCanvas, TColorWheel, TPad, TArrow, TBox, TDiamond, TEllipse, TFrame, TLegend, TMarker, TPave, TPaveLabel, TPavesText, TPaveText, TPolyLine, TWbox, TGraphStruct, TEveGeoNode, TEveGeoTopNode, TPolyLine3D, TPolyMarker3D, TStructViewer, TStructViewerGUI, TF1, TF2, TF3, TH1, TPolyMarker, TSpline, TFile, TMatrixTBase< Element >, TMatrixTBase< AReal >, TMatrixTBase< Double_t >, TVectorT< Element >, TVectorT< Double_t >, TMultiLayerPerceptron, TGenerator, RooAbsData, TTreePerfStats, TParallelCoordVar, TGItemContext, TVirtualPad, TPie, TGraph2D, TGraphPolar, TGraphPolargram, TParallelCoord, TParallelCoordRange, TSpider, RooPlot, and RooStats::SamplingDistPlot.
Definition at line 293 of file TObject.cxx.
|
virtualinherited |
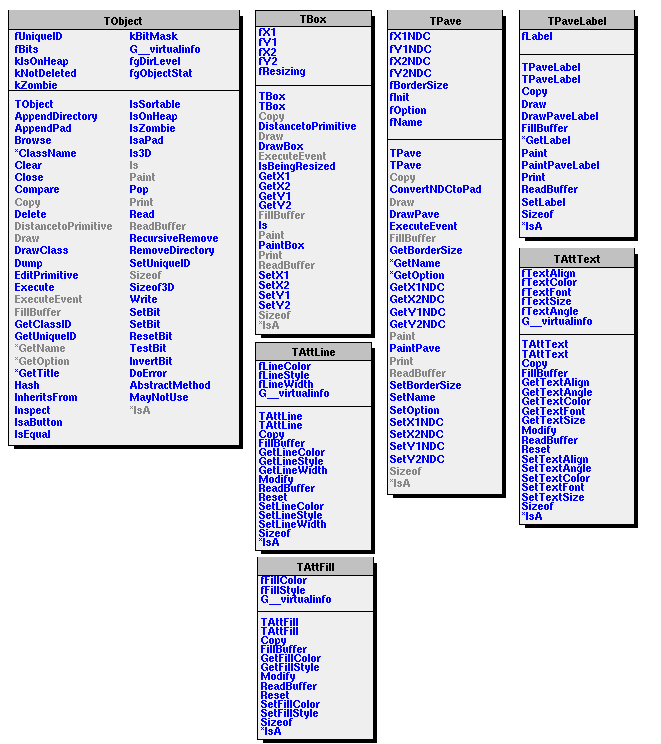
Draw class inheritance tree of the class to which this object belongs.
If a class B inherits from a class A, description of B is drawn on the right side of description of A. Member functions overridden by B are shown in class A with a blue line crossing-out the corresponding member function. The following picture is the class inheritance tree of class TPaveLabel:
Reimplemented in TSystemDirectory, TSystemFile, and TGFrame.
Definition at line 308 of file TObject.cxx.
Draw a clone of this object in the current selected pad with: gROOT->SetSelectedPad(c1).
If pad was not selected - gPad will be used.
Reimplemented in TSystemDirectory, TSystemFile, TGFrame, TAxis, and TCanvas.
Definition at line 319 of file TObject.cxx.
|
virtualinherited |
Dump contents of object on stdout.
Using the information in the object dictionary (class TClass) each data member is interpreted. If a data member is a pointer, the pointer value is printed
The following output is the Dump of a TArrow object:
Reimplemented in TSystemFile, TCollection, TClass, TGFrame, and TGPack.
Definition at line 367 of file TObject.cxx.
Issue error message.
Use "location" to specify the method where the error occurred. Accepts standard printf formatting arguments.
Reimplemented in TFitResult.
Definition at line 1098 of file TObject.cxx.
|
virtualinherited |
Execute method on this object with the given parameter string, e.g.
"3.14,1,\"text\"".
Reimplemented in TMethodCall, TCling, TInterpreter, and TContextMenu.
Definition at line 378 of file TObject.cxx.
|
virtualinherited |
Execute method on this object with parameters stored in the TObjArray.
The TObjArray should contain an argv vector like:
Reimplemented in TCling, TMethodCall, TInterpreter, and TContextMenu.
Definition at line 398 of file TObject.cxx.
Execute action corresponding to an event at (px,py).
This method must be overridden if an object can react to graphics events.
Reimplemented in TParallelCoord, TParallelCoordRange, TParallelCoordVar, TGeoManager, TGeoNode, TGeoShape, TGeoVolume, TGeoOverlap, TGeoTrack, TASImage, TASPaletteEditor::LimitLine, TButton, TCanvas, TGroupButton, TPad, TSliderBox, TBox, TCrown, TCurlyArc, TCurlyLine, TDiamond, TEllipse, TFrame, TGraphPolargram, TLine, TLink, TMarker, TPave, TPolyLine, TText, TWbox, TGraphEdge, TGraphNode, TAxis3D, TMarker3DBox, TPolyLine3D, TPolyMarker3D, TView3D, TGL5DDataSet, TGLEventHandler, TGLHistPainter, TGLParametricEquation, TGLTH3Composition, TGLViewer, TAxis, TEfficiency, TF1, TF2, TF3, TGraph, TGraph2D, TH1, TPolyMarker, TScatter, TScatter2D, TSpline, THistPainter, TPaletteAxis, TGenerator, TParticle, TPrimary, TTreePerfStats, TSpider, TView, TVirtualHistPainter, TPie, and TGLScenePad.
Definition at line 415 of file TObject.cxx.
Issue fatal error message.
Use "location" to specify the method where the fatal error occurred. Accepts standard printf formatting arguments.
Definition at line 1126 of file TObject.cxx.
Must be redefined in derived classes.
This function is typically used with TCollections, but can also be used to find an object by name inside this object.
Reimplemented in TListOfEnums, TMap, TDirectory, TFolder, TROOT, TListOfTypes, TListOfTypes, TBtree, TCollection, THashList, THashTable, TList, TObjArray, TListOfDataMembers, TListOfDataMembers, TListOfEnums, TListOfEnumsWithLock, TListOfFunctions, TListOfFunctionTemplates, TListOfFunctionTemplates, TViewPubDataMembers, TViewPubFunctions, TPad, THbookFile, TGraph, TGraph2D, TH1, RooAbsCollection, and RooLinkedList.
Definition at line 425 of file TObject.cxx.
Must be redefined in derived classes.
This function is typically used with TCollections, but can also be used to find an object inside this object.
Reimplemented in TMap, TDirectory, TFolder, TROOT, TListOfTypes, TBtree, TCollection, THashList, THashTable, TList, TObjArray, TListOfDataMembers, TListOfEnums, TListOfEnumsWithLock, TListOfFunctions, TListOfFunctionTemplates, TViewPubDataMembers, TViewPubFunctions, TPad, THbookFile, TGraph, TGraph2D, TH1, RooAbsCollection, and RooLinkedList.
Definition at line 435 of file TObject.cxx.
|
virtualinherited |
Get option used by the graphics system to draw this object.
Note that before calling object.GetDrawOption(), you must have called object.Draw(..) before in the current pad.
Reimplemented in TBrowser, TFitEditor, TGedFrame, TGFileBrowser, TRootBrowser, and TRootBrowserLite.
Definition at line 445 of file TObject.cxx.
|
staticinherited |
Return destructor only flag.
Definition at line 1196 of file TObject.cxx.
|
virtualinherited |
Returns mime type name of object.
Used by the TBrowser (via TGMimeTypes class). Override for class of which you would like to have different icons for objects of the same class.
Reimplemented in TSystemFile, TGeoVolume, TASImage, TGMainFrame, TKey, ROOT::Experimental::XRooFit::xRooNode, TBranch, TVirtualBranchBrowsable, TMethodBrowsable, and TBranchElement.
Definition at line 472 of file TObject.cxx.
|
virtualinherited |
Returns name of object.
This default method returns the class name. Classes that give objects a name should override this method.
Reimplemented in TSQLClassColumnInfo, TSQLClassInfo, TSQLColumnData, TEnvRec, TNamed, TObjString, TParameter< AParamType >, TParameter< Long64_t >, TQCommand, TQConnection, TQSlot, TCollection, TPair, TRealData, TGeoDecayChannel, TGeoShape, TVirtualGeoTrack, TGeoVGShape, TPad, TGaxis, TPave, TEveGeoNode, TPolyMarker3D, TGLEmbeddedViewer, TGLPShapeObj, TGLSAViewer, TStructNode, TGMenuEntry, TGMenuTitle, TGPicture, TGWindow, TIconBoxThumb, TArchiveMember, TMapFile, TXMLAttr, TStatistic, TParticle, TPrimary, RooAbsCollection, RooCatType, RooLinkedList, TMVA::DataSetInfo, TMVA::FitterBase, TMVA::MethodBase, TMVA::OptionBase, TMVA::PDF, TMVA::Reader, TMVA::VariableTransformBase, TTreePerfStats, TTVRecord, TTVSession, and TVirtualPad.
Definition at line 462 of file TObject.cxx.
Returns string containing info about the object at position (px,py).
This method is typically overridden by classes of which the objects can report peculiarities for different positions. Returned string will be re-used (lock in MT environment).
Reimplemented in TGeoNode, TGeoVolume, TGeoTrack, TASImage, TColorWheel, TAxis3D, TGL5DDataSet, TGLHistPainter, TGLParametricEquation, TGLTH3Composition, TF1, TF2, TGraph, TH1, THistPainter, TPaletteAxis, TFileDrawMap, TParallelCoordVar, and TVirtualHistPainter.
Definition at line 491 of file TObject.cxx.
|
staticinherited |
Get status of object stat flag.
Definition at line 1181 of file TObject.cxx.
Reimplemented in TGeoVolume, TArrow, TGaxis, TLegendEntry, TPave, TPolyLine, TAxis3D, TPolyLine3D, TPolyMarker3D, TH1, TPolyMarker, TFile, TMapFile, TPSocket, TSocket, TUDPSocket, TSelector, and TPoints3DABC.
| Double_t TQuaternion::GetQAngle | ( | ) | const |
Get angle of quaternion (rad) N.B : this angle is half of the corresponding rotation angle.
Definition at line 155 of file TQuaternion.cxx.
|
inline |
Definition at line 131 of file TQuaternion.h.
|
inline |
Definition at line 136 of file TQuaternion.h.
|
virtualinherited |
Returns title of object.
This default method returns the class title (i.e. description). Classes that give objects a title should override this method.
Reimplemented in TNamed, TQCommand, TPair, TClassMenuItem, TBaseClass, TASImage, TPad, TGaxis, TPaveLabel, TEveGeoNode, TEvePointSet, TGTextButton, TGGroupFrame, TGLabel, TGTextLBEntry, TGLVEntry, TGTextEntry, TRootIconList, TAxis, TKey, TMapFile, TParticle, TPrimary, Axis2, TParallelCoordSelect, and TVirtualPad.
Definition at line 507 of file TObject.cxx.
|
virtualinherited |
Return the unique object id.
Definition at line 480 of file TObject.cxx.
Execute action in response of a timer timing out.
This method must be overridden if an object has to react to timers.
Reimplemented in TGWindow, TGuiBldDragManager, TGraphTime, TGLEventHandler, TGCommandPlugin, TGDNDManager, TGFileContainer, TGPopupMenu, TGScrollBar, TGShutter, TGTextEdit, TGTextEditor, TGTextEntry, TGTextView, TGToolTip, TGHtml, and TTreeViewer.
Definition at line 516 of file TObject.cxx.
|
virtualinherited |
Return hash value for this object.
Note: If this routine is overloaded in a derived class, this derived class should also add
Otherwise, when RecursiveRemove is called (by ~TObject or example) for this type of object, the transversal of THashList and THashTable containers will will have to be done without call Hash (and hence be linear rather than logarithmic complexity). You will also see warnings like
Reimplemented in TEnvRec, TNamed, TObjString, TParameter< AParamType >, TParameter< Long64_t >, TCollection, TPair, TASImagePlugin, TASPluginGS, TPad, TImagePlugin, TPave, TGObject, TGPicture, TIconBoxThumb, TStatistic, and RooLinkedList.
Definition at line 539 of file TObject.cxx.
|
inlineinherited |
Return true is the type of this object is known to have an inconsistent setup for Hash and RecursiveRemove (i.e.
missing call to RecursiveRemove in destructor).
Note: Since the consistency is only tested for during inserts, this routine will return true for object that have never been inserted whether or not they have a consistent setup. This has no negative side-effect as searching for the object with the right or wrong Hash will always yield a not-found answer (Since anyway no hash can be guaranteed unique, there is always a check)
Issue info message.
Use "location" to specify the method where the warning occurred. Accepts standard printf formatting arguments.
Definition at line 1072 of file TObject.cxx.
Returns kTRUE if object inherits from class "classname".
Reimplemented in TClass.
Definition at line 549 of file TObject.cxx.
Returns kTRUE if object inherits from TClass cl.
Reimplemented in TClass.
Definition at line 557 of file TObject.cxx.
|
virtualinherited |
Dump contents of this object in a graphics canvas.
Same action as Dump but in a graphical form. In addition pointers to other objects can be followed.
The following picture is the Inspect of a histogram object:

Reimplemented in TSystemFile, TInspectorObject, TGFrame, and ROOT::Experimental::XRooFit::xRooNode.
Definition at line 570 of file TObject.cxx.
| TQuaternion TQuaternion::Invert | ( | ) | const |
invert
Definition at line 479 of file TQuaternion.cxx.
|
inlineoverridevirtual |
Reimplemented from TObject.
Definition at line 113 of file TQuaternion.h.
|
inlineinherited |
IsDestructed.
Default equal comparison (objects are equal if they have the same address in memory).
More complicated classes might want to override this function.
Reimplemented in TObjString, TQCommand, TPair, and TGObject.
Definition at line 589 of file TObject.cxx.
|
virtualinherited |
Returns kTRUE in case object contains browsable objects (like containers or lists of other objects).
Reimplemented in TDirectory, TFolder, TRemoteObject, TROOT, TSystemDirectory, TTask, TCollection, TPair, TBrowserObject, TBaseClass, TClass, TGeoManager, TGeoNode, TGeoNodeMatrix, TGeoVolume, TGeoOverlap, TGeoTrack, TCanvas, TPad, TAxis3D, TRootIconList, THbookFile, THbookKey, THnBase, ROOT::Internal::THnBaseBrowsable, TMultiDimFit, TPrincipal, TKey, TMapFile, TSPlot, TDatabasePDG, TParticleClassPDG, TApplicationRemote, ROOT::Experimental::XRooFit::xRooNode, TBranch, TVirtualBranchBrowsable, TBranchClones, TBranchElement, TBranchObject, TBranchSTL, and TTree.
Definition at line 579 of file TObject.cxx.
|
inlineinherited |
Reimplemented in TFileInfo, TNamed, TObjString, TParameter< AParamType >, TParameter< Long64_t >, TUri, TUrl, TCollection, TGeoBranchArray, TGeoOverlap, TPave, TStructNode, TStructNodeProperty, TGFSFrameElement, TGLBFrameElement, RooAbsArg, and RooDouble.
|
inlineinherited |
| TQuaternion TQuaternion::LeftProduct | ( | const TQuaternion & | quaternion | ) | const |
left product
Definition at line 394 of file TQuaternion.cxx.
| TQuaternion TQuaternion::LeftProduct | ( | const TVector3 & | vector | ) | const |
left product
Definition at line 274 of file TQuaternion.cxx.
| TQuaternion TQuaternion::LeftQuotient | ( | const TQuaternion & | quaternion | ) | const |
left quotient
Definition at line 443 of file TQuaternion.cxx.
| TQuaternion TQuaternion::LeftQuotient | ( | const TVector3 & | vector | ) | const |
left quotient
Definition at line 318 of file TQuaternion.cxx.
|
virtualinherited |
The ls function lists the contents of a class on stdout.
Ls output is typically much less verbose then Dump().
Reimplemented in THbookFile, ROOT::Experimental::XRooFit::xRooBrowser, TParameter< AParamType >, TParameter< Long64_t >, TFree, TVirtualStreamerInfo, TQSlot, TClass, TStatistic, TApplication, TColor, TDirectory, TFolder, TNamed, TQCommand, TQUndoManager, TQConnection, TROOT, TQConnectionList, TCollection, TFunction, ROOT::TSchemaRule, ROOT::Detail::TSchemaRuleSet, TStreamerElement, TStreamerBase, TStreamerSTL, TGeoNode, TAnnotation, TCanvas, TClassTree, TPad, TBox, TEllipse, TImage, TLine, TMarker, TPave, TPolyLine, TText, TPolyLine3D, TPolyMarker3D, TGLayoutHints, TGFrameElement, THStack, TPolyMarker, TDirectoryFile, TFile, TKey, TMapFile, TStreamerInfo, TChain, TChainElement, TFriendElement, TVirtualPad, and TTask.
Definition at line 598 of file TObject.cxx.
|
inherited |
Use this method to signal that a method (defined in a base class) may not be called in a derived class (in principle against good design since a child class should not provide less functionality than its parent, however, sometimes it is necessary).
Definition at line 1160 of file TObject.cxx.
| TQuaternion & TQuaternion::MultiplyLeft | ( | const TQuaternion & | quaternion | ) |
left multiplication
Definition at line 378 of file TQuaternion.cxx.
| TQuaternion & TQuaternion::MultiplyLeft | ( | const TVector3 & | vector | ) |
left multiplication
Definition at line 250 of file TQuaternion.cxx.
|
inline |
Definition at line 265 of file TQuaternion.h.
|
inline |
Definition at line 269 of file TQuaternion.h.
|
inline |
Definition at line 273 of file TQuaternion.h.
|
virtualinherited |
This method must be overridden to handle object notification (the base implementation is no-op).
Different objects in ROOT use the Notify method for different purposes, in coordination with other objects that call this method at the appropriate time.
For example, TLeaf uses it to load class information; TBranchRef to load contents of referenced branches TBranchRef; most notably, based on Notify, TChain implements a callback mechanism to inform interested parties when it switches to a new sub-tree.
Reimplemented in TMessageHandler, TNotifyLink< Type >, TNotifyLink< RNoCleanupNotifierHelper >, TNotifyLink< ROOT::Detail::TBranchProxy >, TNotifyLink< TTreeReader >, TFileHandler, TSignalHandler, TStdExceptionHandler, TProcessEventTimer, TTimer, TIdleTimer, TSingleShotCleaner, TCollection, TRefTable, TBrowserTimer, TInterruptHandler, TTermInputHandler, TThreadTimer, TGLRedrawTimer, TViewTimer, TGContainerKeyboardTimer, TGContainerScrollTimer, TGInputHandler, TViewUpdateTimer, TPopupDelayTimer, TRepeatTimer, TSBRepeatTimer, TGTextEditHist, TInsCharCom, TDelCharCom, TBreakLineCom, TInsTextCom, TDelTextCom, TBlinkTimer, TTipDelayTimer, TGuiBldDragManagerRepeatTimer, TARInterruptHandler, TASLogHandler, TASInterruptHandler, TASSigPipeHandler, TASInputHandler, TSocketHandler, TTimeOutTimer, TBranchElement, TBranchRef, TLeafObject, TSelector, TTree, TSelectorDraw, TSelectorEntries, TTreeFormula, TTreeFormulaManager, TTreeReader, h1analysis, h1analysisTreeReader, and TSysEvtHandler.
Definition at line 618 of file TObject.cxx.
|
inherited |
Use this method to declare a method obsolete.
Specify as of which version the method is obsolete and as from which version it will be removed.
Definition at line 1169 of file TObject.cxx.
|
inherited |
Operator delete for sized deallocation.
Definition at line 1234 of file TObject.cxx.
|
inherited |
Operator delete.
Definition at line 1212 of file TObject.cxx.
|
inherited |
Only called by placement new when throwing an exception.
Definition at line 1266 of file TObject.cxx.
|
inherited |
Operator delete [] for sized deallocation.
Definition at line 1245 of file TObject.cxx.
|
inherited |
Operator delete [].
Definition at line 1223 of file TObject.cxx.
|
inherited |
Only called by placement new[] when throwing an exception.
Definition at line 1274 of file TObject.cxx.
|
inlineinherited |
|
inlineinherited |
|
inlineinherited |
|
inline |
Definition at line 230 of file TQuaternion.h.
Definition at line 199 of file TQuaternion.h.
Definition at line 150 of file TQuaternion.h.
dereferencing operator
Definition at line 138 of file TQuaternion.cxx.
dereferencing operator const
Definition at line 121 of file TQuaternion.cxx.
| TQuaternion TQuaternion::operator* | ( | const TQuaternion & | quaternion | ) | const |
right product
Definition at line 403 of file TQuaternion.cxx.
| TQuaternion TQuaternion::operator* | ( | const TVector3 & | vector | ) | const |
right product
Definition at line 281 of file TQuaternion.cxx.
| TQuaternion TQuaternion::operator* | ( | Double_t | real | ) | const |
product of quaternion with a real
Definition at line 208 of file TQuaternion.cxx.
| TQuaternion & TQuaternion::operator*= | ( | const TQuaternion & | quaternion | ) |
right multiplication
Definition at line 363 of file TQuaternion.cxx.
| TQuaternion & TQuaternion::operator*= | ( | const TVector3 & | vector | ) |
right multiplication
Definition at line 262 of file TQuaternion.cxx.
|
inline |
Definition at line 170 of file TQuaternion.h.
|
inline |
Definition at line 254 of file TQuaternion.h.
| TQuaternion TQuaternion::operator+ | ( | const TVector3 & | vector | ) | const |
sum of quaternion with a real
Definition at line 236 of file TQuaternion.cxx.
| TQuaternion TQuaternion::operator+ | ( | Double_t | real | ) | const |
sum of quaternion with a real
Definition at line 194 of file TQuaternion.cxx.
|
inline |
Definition at line 242 of file TQuaternion.h.
|
inline |
Definition at line 209 of file TQuaternion.h.
|
inline |
Definition at line 160 of file TQuaternion.h.
|
inline |
Definition at line 279 of file TQuaternion.h.
|
inline |
Definition at line 259 of file TQuaternion.h.
| TQuaternion TQuaternion::operator- | ( | const TVector3 & | vector | ) | const |
subtraction of real to quaternion
Definition at line 243 of file TQuaternion.cxx.
| TQuaternion TQuaternion::operator- | ( | Double_t | real | ) | const |
subtraction of real to quaternion
Definition at line 201 of file TQuaternion.cxx.
|
inline |
Definition at line 248 of file TQuaternion.h.
|
inline |
Definition at line 214 of file TQuaternion.h.
|
inline |
Definition at line 165 of file TQuaternion.h.
| TQuaternion TQuaternion::operator/ | ( | const TQuaternion & | quaternion | ) | const |
right quotient
Definition at line 461 of file TQuaternion.cxx.
| TQuaternion TQuaternion::operator/ | ( | const TVector3 & | vector | ) | const |
right quotient
Definition at line 334 of file TQuaternion.cxx.
| TQuaternion TQuaternion::operator/ | ( | Double_t | real | ) | const |
division by a real
Definition at line 216 of file TQuaternion.cxx.
| TQuaternion & TQuaternion::operator/= | ( | const TQuaternion & | quaternion | ) |
right division
Definition at line 427 of file TQuaternion.cxx.
| TQuaternion & TQuaternion::operator/= | ( | const TVector3 & | vector | ) |
right division
Definition at line 303 of file TQuaternion.cxx.
|
inline |
Definition at line 176 of file TQuaternion.h.
|
inline |
Definition at line 234 of file TQuaternion.h.
|
inlinenoexcept |
Definition at line 203 of file TQuaternion.h.
|
inline |
Definition at line 154 of file TQuaternion.h.
|
inline |
Definition at line 226 of file TQuaternion.h.
Definition at line 195 of file TQuaternion.h.
Definition at line 146 of file TQuaternion.h.
Definition at line 141 of file TQuaternion.h.
Definition at line 142 of file TQuaternion.h.
|
virtualinherited |
This method must be overridden if a class wants to paint itself.
The difference between Paint() and Draw() is that when a object draws itself it is added to the display list of the pad in which it is drawn (and automatically redrawn whenever the pad is redrawn). While paint just draws the object without adding it to the pad display list.
Reimplemented in TPie, TSQLFile, TXMLFile, ROOT::RGeoPainter, TGaxis, TGraph, TGraphTime, THStack, TMultiGraph, TScatter, TScatter2D, TTreePerfStats, ROOT::Experimental::RTreeMapPainter, TEfficiency, TRatioPlot, TGeoBoolNode, TGeoUnion, TGeoIntersection, TGeoSubtraction, TMarker3DBox, TGL5DDataSet, TGLHistPainter, TGLParametricEquation, TGLTH3Composition, TGraph2DPainter, TSpectrum2Painter, TFileDrawMap, TDirectory, TExec, TMacro, TStyle, TBits, TCollection, TGeoNode, TGeoPhysicalNode, TGeoShape, TGeoVolume, TGeoOverlap, TGeoPainter, TGeoTrack, TGeoVGShape, TASImage, TASPaletteEditor::PaintPalette, TASPaletteEditor::LimitLine, TAnnotation, TButton, TCanvas, TClassTree, TColorWheel, TPad, TArrow, TBox, TCrown, TDiamond, TEllipse, TFrame, TLatex, TLegend, TLine, TMarker, TMathText, TPave, TPaveLabel, TPaveStats, TPavesText, TPaveText, TPolyLine, TText, TWbox, TGraphEdge, TGraphNode, TEveArrow, TEveCaloViz, TEveDigitSet, TEveGeoTopNode, TEveGeoShape, TEvePlot3D, TEvePointSet, TEveProjectionAxes, TEveScene, TEveShape, TEveStraightLineSet, TEveText, TEveTriangleSet, TAxis3D, TPolyLine3D, TPolyMarker3D, TF1, TF2, TF3, TGraph2D, TH1, TPolyMarker, TSpline, THistPainter, TPaletteAxis, TFile, TGenerator, TParticle, TPrimary, TParallelCoordVar, TVirtualPad, TVirtualGeoPainter, TVirtualGeoTrack, TVirtualHistPainter, TParallelCoordRange, TSpider, TGraphPolargram, and TParallelCoord.
Definition at line 631 of file TObject.cxx.
|
virtualinherited |
Pop on object drawn in a pad to the top of the display list.
I.e. it will be drawn last and on top of all other primitives.
Reimplemented in TPad, TFrame, and TVirtualPad.
Definition at line 640 of file TObject.cxx.
|
overridevirtual |
Print Quaternion parameters.
Reimplemented from TObject.
Definition at line 527 of file TQuaternion.cxx.
|
inline |
Definition at line 99 of file TQuaternion.h.
|
inline |
Definition at line 100 of file TQuaternion.h.
Read contents of object with specified name from the current directory.
First the key with the given name is searched in the current directory, next the key buffer is deserialized into the object. The object must have been created before via the default constructor. See TObject::Write().
Reimplemented in TKeyXML, TBuffer, TKey, and TKeySQL.
Definition at line 673 of file TObject.cxx.
|
virtualinherited |
Recursively remove this object from a list.
Typically implemented by classes that can contain multiple references to a same object.
Reimplemented in THistPainter, TCling, TDirectory, TFolder, TProcessID, TROOT, TCollection, THashList, TList, TObjArray, TBrowser, TObjectSpy, TObjectRefSpy, TListOfDataMembers, TListOfEnums, TListOfEnumsWithLock, TListOfFunctions, TListOfFunctionTemplates, ROOT::Internal::TCheckHashRecursiveRemoveConsistency, TViewPubDataMembers, TViewPubFunctions, TDialogCanvas, TInspectCanvas, TPad, TLegend, ROOT::RBrowserDataCleanup, TFitEditor, TGedEditor, TH1Editor, TH2Editor, TGFileBrowser, TRootBrowser, TRootBrowserLite, TRootContextMenu, TRootBrowserHistory, TEfficiency, TGraph, TGraph2D, TH1, THStack, TMultiGraph, TFileMerger, RooAbsCollection, RooAbsData, RooLinkedList, RooMCStudy, RooWorkspace, TChain, TFriendElement, TTree, TTreePlayer, and TVirtualPad.
Definition at line 684 of file TObject.cxx.
| void TQuaternion::Rotate | ( | TVector3 & | vect | ) | const |
rotate vect by current quaternion
Definition at line 493 of file TQuaternion.cxx.
rotation of vect by current quaternion
Definition at line 500 of file TQuaternion.cxx.
Save this object in the file specified by filename.
otherwise the object is written to filename as a CINT/C++ script. The C++ code to rebuild this object is generated via SavePrimitive(). The "option" parameter is passed to SavePrimitive. By default it is an empty string. It can be used to specify the Draw option in the code generated by SavePrimitive.
The function is available via the object context menu.
Reimplemented in TSpline, TFolder, TGeoVolume, TClassTree, TPad, TPaveClass, TGObject, TSpline3, TSpline5, ROOT::Experimental::XRooFit::xRooNode, TTreePerfStats, TVirtualPad, TGraph, and TH1.
Definition at line 708 of file TObject.cxx.
|
virtualinherited |
Save a primitive as a C++ statement(s) on output stream "out".
Reimplemented in TGeoTessellated, TGraphEdge, TGraphNode, TGeoIdentity, TStyle, TCurlyArc, TCurlyLine, TGedMarkerSelect, TGedPatternSelect, TGColorSelect, TGFont, TGVerticalLayout, TGHorizontalLayout, TGRowLayout, TGColumnLayout, TGMatrixLayout, TGTileLayout, TGListLayout, TGListDetailsLayout, TGTextLBEntry, TGNumberEntryField, TGNumberEntry, TGTableLayoutHints, TGTableLayout, TGTextEdit, TGTextView, TGXYLayoutHints, TGXYLayout, TRootContainer, TGHtml, TEfficiency, TExec, TMacro, TGeoArb8, TGeoTrap, TGeoGtra, TGeoBBox, TGeoBoolNode, TGeoUnion, TGeoIntersection, TGeoSubtraction, TGeoCompositeShape, TGeoCone, TGeoConeSeg, TGeoElementRN, TGeoDecayChannel, TGeoEltu, TGeoHalfSpace, TGeoHype, TGeoMaterial, TGeoMixture, TGeoTranslation, TGeoRotation, TGeoCombiTrans, TGeoHMatrix, TGeoMedium, TGeoPara, TGeoParaboloid, TGeoPatternX, TGeoPatternY, TGeoPatternZ, TGeoPatternParaX, TGeoPatternParaY, TGeoPatternParaZ, TGeoPatternTrapZ, TGeoPatternCylR, TGeoPatternCylPhi, TGeoPatternSphR, TGeoPatternSphTheta, TGeoPatternSphPhi, TGeoPcon, TGeoPgon, TGeoScaledShape, TGeoShapeAssembly, TGeoSphere, TGeoTorus, TGeoTrd1, TGeoTrd2, TGeoTube, TGeoTubeSeg, TGeoCtub, TGeoVolume, TGeoXtru, TASImage, TAnnotation, TButton, TCanvas, TGroupButton, TPad, TPaveClass, TSlider, TSliderBox, TArc, TArrow, TBox, TCrown, TCutG, TDiamond, TEllipse, TFrame, TGaxis, TGraphPolar, TGraphPolargram, TLatex, TLegend, TLine, TMarker, TMathText, TPave, TPaveLabel, TPaveStats, TPavesText, TPaveText, TPolyLine, TText, TWbox, TGraphStruct, TAxis3D, TMarker3DBox, TPolyLine3D, TPolyMarker3D, TGHorizontal3DLine, TGVertical3DLine, TGButton, TGTextButton, TGPictureButton, TGCheckButton, TGRadioButton, TGButtonGroup, TGVButtonGroup, TGHButtonGroup, TGContainer, TGCanvas, TGComboBox, TGLineStyleComboBox, TGLineWidthComboBox, TGDockableFrame, TGDoubleVSlider, TGDoubleHSlider, TGFrame, TGCompositeFrame, TGVerticalFrame, TGHorizontalFrame, TGMainFrame, TGTransientFrame, TGGroupFrame, TGFSComboBox, TGFileContainer, TGGC, TGIcon, TGLabel, TGLayoutHints, TGListBox, TGListTree, TGListView, TGLVContainer, TGMdiFrame, TGMdiMainFrame, TGMdiMenuBar, TGPopupMenu, TGMenuTitle, TGMenuBar, TGProgressBar, TGHProgressBar, TGVProgressBar, TGHScrollBar, TGVScrollBar, TGShapedFrame, TGShutterItem, TGShutter, TGVSlider, TGHSlider, TGSplitFrame, TGVSplitter, TGHSplitter, TGVFileSplitter, TGStatusBar, TGTabLayout, TGTab, TGTextEntry, TGToolBar, TGTripleVSlider, TGTripleHSlider, TRootEmbeddedCanvas, TF1, TF12, TF2, TF3, TGraph, TGraph2D, TGraph2DAsymmErrors, TGraph2DErrors, TGraphAsymmErrors, TGraphBentErrors, TGraphErrors, TGraphMultiErrors, TH1, TH2Poly, THStack, TMultiGraph, TPolyMarker, TProfile, TProfile2D, TProfile3D, TScatter, TScatter2D, TSpline3, TSpline5, TPaletteAxis, TChain, TTreePerfStats, TParallelCoord, TParallelCoordVar, TPie, and TPieSlice.
Definition at line 858 of file TObject.cxx.
|
staticprotectedinherited |
Save object constructor in the output stream "out".
Can be used as first statement when implementing SavePrimitive() method for the object
Definition at line 777 of file TObject.cxx.
|
staticprotectedinherited |
Save invocation of primitive Draw() method Skipped if option contains "nodraw" string.
Definition at line 845 of file TObject.cxx.
|
staticprotectedinherited |
Save array in the output stream "out" as vector.
Create unique variable name based on prefix value Returns name of vector which can be used in constructor or in other places of C++ code If flag === kTRUE, just add empty line If flag === 111, check if array is empty and return nullptr or <vectorname>.data()
Definition at line 796 of file TObject.cxx.
| TQuaternion & TQuaternion::SetAxisQAngle | ( | TVector3 & | v, |
| Double_t | QAngle ) |
set quaternion from vector and angle (rad) quaternion is set as unitary N.B : this angle is half of the corresponding rotation angle
Definition at line 179 of file TQuaternion.cxx.
Set or unset the user status bits as specified in f.
Definition at line 888 of file TObject.cxx.
|
virtualinherited |
Set drawing option for object.
This option only affects the drawing style and is stored in the option field of the TObjOptLink supporting a TPad's primitive list (TList). Note that it does not make sense to call object.SetDrawOption(option) before having called object.Draw().
Reimplemented in TSystemDirectory, TSystemFile, TPad, TGFrame, TAxis, TBrowser, TPaveStats, TGedFrame, TRootBrowserLite, and RooPlot.
Definition at line 871 of file TObject.cxx.
|
staticinherited |
Set destructor only flag.
Definition at line 1204 of file TObject.cxx.
|
staticinherited |
Turn on/off tracking of objects in the TObjectTable.
Definition at line 1188 of file TObject.cxx.
| TQuaternion & TQuaternion::SetQAngle | ( | Double_t | angle | ) |
Set angle of quaternion (rad) - keep quaternion norm N.B : this angle is half of the corresponding rotation angle.
Definition at line 165 of file TQuaternion.cxx.
|
inline |
Definition at line 125 of file TQuaternion.h.
|
inline |
Definition at line 119 of file TQuaternion.h.
|
virtualinherited |
Set the unique object id.
Definition at line 899 of file TObject.cxx.
|
overridevirtual |
|
inline |
Definition at line 113 of file TQuaternion.h.
Issue system error message.
Use "location" to specify the method where the system error occurred. Accepts standard printf formatting arguments.
Definition at line 1112 of file TObject.cxx.
|
inlineinherited |
|
virtualinherited |
Set current style settings in this object This function is called when either TCanvas::UseCurrentStyle or TROOT::ForceStyle have been invoked.
Reimplemented in TCanvas, TPad, TFrame, TPaveStats, TPaveText, TAxis3D, TGraph, TH1, and TTree.
Definition at line 909 of file TObject.cxx.
Issue warning message.
Use "location" to specify the method where the warning occurred. Accepts standard printf formatting arguments.
Definition at line 1084 of file TObject.cxx.
|
virtualinherited |
Write this object to the current directory.
For more see the const version of this method.
Reimplemented in TSQLFile, TXMLFile, TDirectory, TBuffer, ROOT::TBufferMergerFile, TDirectoryFile, TFile, TParallelMergingFile, TCollection, TMap, and TTree.
Definition at line 989 of file TObject.cxx.
|
virtualinherited |
Write this object to the current directory.
The data structure corresponding to this object is serialized. The corresponding buffer is written to the current directory with an associated key with name "name".
Writing an object to a file involves the following steps:
Bufsize can be given to force a given buffer size to write this object. By default, the buffersize will be taken from the average buffer size of all objects written to the current file so far.
If a name is specified, it will be the name of the key. If name is not given, the name of the key will be the name as returned by GetName().
The option can be a combination of: kSingleKey, kOverwrite or kWriteDelete Using the kOverwrite option a previous key with the same name is overwritten. The previous key is deleted before writing the new object. Using the kWriteDelete option a previous key with the same name is deleted only after the new object has been written. This option is safer than kOverwrite but it is slower. NOTE: Neither kOverwrite nor kWriteDelete reduces the size of a TFile– the space is simply freed up to be overwritten; in the case of a TTree, it is more complicated. If one opens a TTree, appends some entries, then writes it out, the behaviour is effectively the same. If, however, one creates a new TTree and writes it out in this way, only the metadata is replaced, effectively making the old data invisible without deleting it. TTree::Delete() can be used to mark all disk space occupied by a TTree as free before overwriting its metadata this way. The kSingleKey option is only used by TCollection::Write() to write a container with a single key instead of each object in the container with its own key.
An object is read from the file into memory via TKey::Read() or via TObject::Read().
The function returns the total number of bytes written to the file. It returns 0 if the object cannot be written.
Reimplemented in TSQLFile, TXMLFile, TDirectory, TBuffer, TDirectoryFile, TFile, TParallelMergingFile, TCollection, TMap, and TTree.
Definition at line 964 of file TObject.cxx.
|
privateinherited |
|
staticprivateinherited |
if true keep track of objects in TObjectTable
| Double_t TQuaternion::fRealPart |
Definition at line 110 of file TQuaternion.h.
|
privateinherited |
| TVector3 TQuaternion::fVectorPart |
Definition at line 111 of file TQuaternion.h.

