

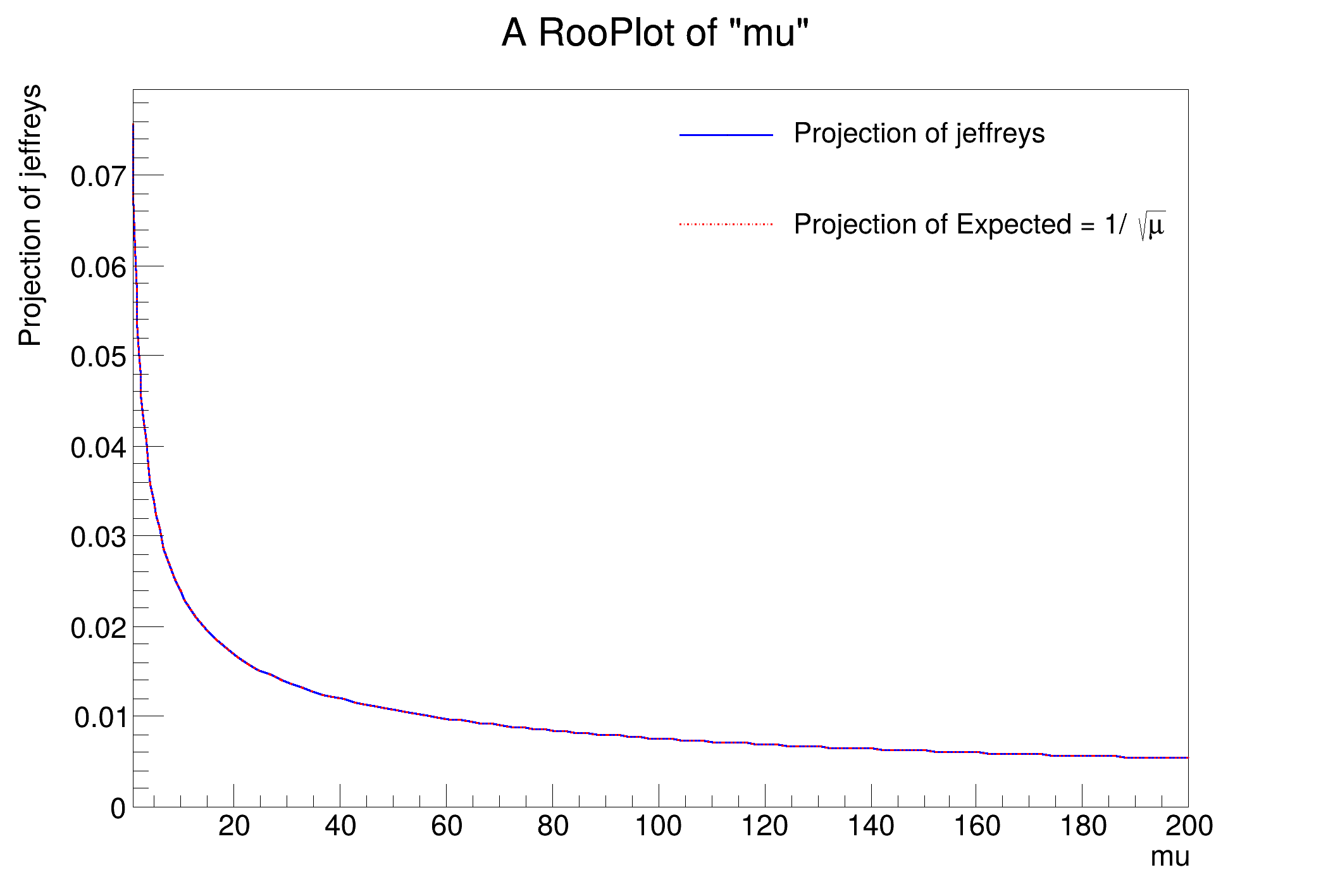
tutorial demonstrating and validates the RooJeffreysPrior class
Jeffreys's prior is an 'objective prior' based on formal rules. It is calculated from the Fisher information matrix.
Read more: http://en.wikipedia.org/wiki/Jeffreys_prior
The analytic form is not known for most PDFs, but it is for simple cases like the Poisson mean, Gaussian mean, Gaussian sigma.
This class uses numerical tricks to calculate the Fisher Information Matrix efficiently. In particular, it takes advantage of a property of the 'Asimov data' as described in Asymptotic formulae for likelihood-based tests of new physics Glen Cowan, Kyle Cranmer, Eilam Gross, Ofer Vitells http://arxiv.org/abs/arXiv:1007.1727
This Demo has four parts:
- TestJeffreysPriorDemo – validates Poisson mean case 1/sqrt(mu)
- TestJeffreysGaussMean – validates Gaussian mean case
- TestJeffreysGaussSigma – validates Gaussian sigma case 1/sigma
- TestJeffreysGaussMeanAndSigma – demonstrates 2-d example
[#1] INFO:Minimization -- p.d.f. provides expected number of events, including extended term in likelihood.
[#1] INFO:Fitting -- RooAbsPdf::fitTo(p) fixing normalization set for coefficient determination to observables in data
[#1] INFO:Fitting -- using generic CPU library compiled with no vectorizations
[#1] INFO:Fitting -- Creation of NLL object took 584.731 μs
[#1] INFO:Fitting -- RooAddition::defaultErrorLevel(nll_p_genData) Summation contains a RooNLLVar, using its error level
[#1] INFO:Minimization -- [fitFCN] No discrete parameters, performing continuous minimization only
Minuit2Minimizer: Minimize with max-calls 500 convergence for edm < 1 strategy 1
Minuit2Minimizer : Valid minimum - status = 0
FVAL = -360.517018598809159
Edm = 4.13877261906962124e-17
Nfcn = 22
mu = 100 +/- 9.98317 (limited)
[#1] INFO:Fitting -- RooAbsPdf::fitTo(p) Calculating sum-of-weights-squared correction matrix for covariance matrix
RooDataHist::genData[x] = 100 bins (100 weights)
RooFitResult: minimized FCN value: -360.517, estimated distance to minimum: 3.66543e-18
covariance matrix quality: Full, accurate covariance matrix
Status : MINIMIZE=0 HESSE=0 HESSE=0
Floating Parameter FinalValue +/- Error
-------------------- --------------------------
mu 1.0000e+02 +/- 1.00e+01
variance = 100.016
stdev = 10.0008
jeffreys = 0.0999921
[#1] INFO:NumericIntegration -- RooRealIntegral::init(jeffreys_Int[mu]) using numeric integrator RooAdaptiveGaussKronrodIntegrator1D to calculate Int(mu)
[#1] INFO:NumericIntegration -- RooRealIntegral::init(Expected_Int[mu]) using numeric integrator RooIntegrator1D to calculate Int(mu)
void rs302_JeffreysPriorDemo()
{
w.factory(
"Uniform::u(x[0,1])");
w.factory(
"mu[100,1,200]");
w.factory(
"ExtendPdf::p(u,mu)");
std::unique_ptr<RooDataHist> asimov{
w.pdf(
"p")->generateBinned(*
w.var(
"x"), ExpectedData())};
std::unique_ptr<RooFitResult> res{
w.pdf(
"p")->fitTo(*asimov, Save(), SumW2Error(
true))};
asimov->Print();
res->Print();
cout <<
"variance = " << (
cov.Determinant()) << endl;
cout <<
"stdev = " << sqrt(
cov.Determinant()) << endl;
cout <<
"jeffreys = " << sqrt(
cov.Determinant()) << endl;
w.defineSet(
"poi",
"mu");
}
{
w.factory(
"Gaussian::g(x[0,-20,20],mu[0,-5.,5],sigma[1,0,10])");
w.factory(
"n[10,.1,200]");
w.factory(
"ExtendPdf::p(g,n)");
w.var(
"sigma")->setConstant();
w.var(
"n")->setConstant();
std::unique_ptr<RooDataHist> asimov{
w.pdf(
"p")->generateBinned(*
w.var(
"x"),
ExpectedData())};
std::unique_ptr<RooFitResult> res{
w.pdf(
"p")->fitTo(*asimov,
Save(),
SumW2Error(
true))};
asimov->Print();
res->Print();
cout <<
"variance = " << (
cov.Determinant()) << endl;
cout <<
"stdev = " << sqrt(
cov.Determinant()) << endl;
cout <<
"jeffreys = " << sqrt(
cov.Determinant()) << endl;
w.defineSet(
"poi",
"mu");
pi.getParameters(*temp)->Print();
}
{
w.factory(
"Gaussian::g(x[0,-20,20],mu[0,-5,5],sigma[1,1,5])");
w.factory(
"n[100,.1,2000]");
w.factory(
"ExtendPdf::p(g,n)");
w.var(
"mu")->setConstant();
w.var(
"n")->setConstant();
w.var(
"x")->setBins(301);
std::unique_ptr<RooDataHist> asimov{
w.pdf(
"p")->generateBinned(*
w.var(
"x"),
ExpectedData())};
std::unique_ptr<RooFitResult> res{
w.pdf(
"p")->fitTo(*asimov,
Save(),
SumW2Error(
true))};
asimov->Print();
res->Print();
cout <<
"variance = " << (
cov.Determinant()) << endl;
cout <<
"stdev = " << sqrt(
cov.Determinant()) << endl;
cout <<
"jeffreys = " << sqrt(
cov.Determinant()) << endl;
w.defineSet(
"poi",
"sigma");
pi.getParameters(*temp)->Print();
}
{
w.factory(
"Gaussian::g(x[0,-20,20],mu[0,-5,5],sigma[1,1.,5.])");
w.factory(
"n[100,.1,2000]");
w.factory(
"ExtendPdf::p(g,n)");
w.var(
"n")->setConstant();
w.var(
"x")->setBins(301);
std::unique_ptr<RooDataHist> asimov{
w.pdf(
"p")->generateBinned(*
w.var(
"x"),
ExpectedData())};
std::unique_ptr<RooFitResult> res{
w.pdf(
"p")->fitTo(*asimov,
Save(),
SumW2Error(
true))};
asimov->Print();
res->Print();
cout <<
"variance = " << (
cov.Determinant()) << endl;
cout <<
"stdev = " << sqrt(
cov.Determinant()) << endl;
cout <<
"jeffreys = " << sqrt(
cov.Determinant()) << endl;
w.defineSet(
"poi",
"mu,sigma");
pi.getParameters(*temp)->Print();
}
ROOT::Detail::TRangeCast< T, true > TRangeDynCast
TRangeDynCast is an adapter class that allows the typed iteration through a TCollection.
winID h TVirtualViewer3D TVirtualGLPainter char TVirtualGLPainter plot
RooArgSet is a container object that can hold multiple RooAbsArg objects.
Implementation of a probability density function that takes a RooArgList of servers and a C++ express...
Implementation of Jeffrey's prior.
Plot frame and a container for graphics objects within that frame.
Persistable container for RooFit projects.
TH1 is the base class of all histogram classes in ROOT.
RooCmdArg YVar(const RooAbsRealLValue &var, const RooCmdArg &arg={})
RooCmdArg Save(bool flag=true)
RooCmdArg SumW2Error(bool flag)
RooCmdArg ExpectedData(bool flag=true)
RooCmdArg Binning(const RooAbsBinning &binning)
RooCmdArg LineColor(TColorNumber color)
RooCmdArg LineStyle(Style_t style)
The namespace RooFit contains mostly switches that change the behaviour of functions of PDFs (or othe...
- Author
- Kyle Cranmer
Definition in file rs302_JeffreysPriorDemo.C.


